

Quick formation control method based on pseudo-distributed unmanned aerial vehicle cluster
A control method and technology of unmanned aerial vehicle, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as energy consumption, and achieve the effects of small communication burden, powerful control method, and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
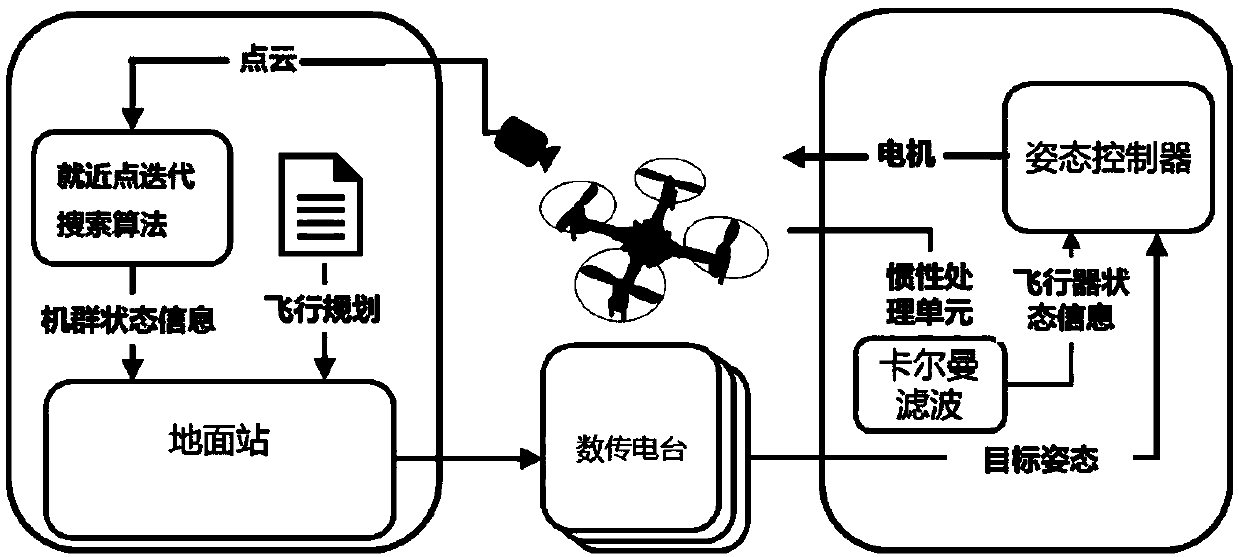
[0051] Such as figure 1 As shown, this embodiment provides a fast formation control method based on a pseudo-distributed UAV cluster, and this method includes the following steps:
[0052] Step 1: The ground station obtains the current pose of each UAV;
[0053] Step 2: The ground station calculates the target pose of each UAV;
[0054] Step 3: The ground station broadcasts the target pose to each drone;
[0055] Step 4: Each drone controls the flight trajectory according to the received target pose.
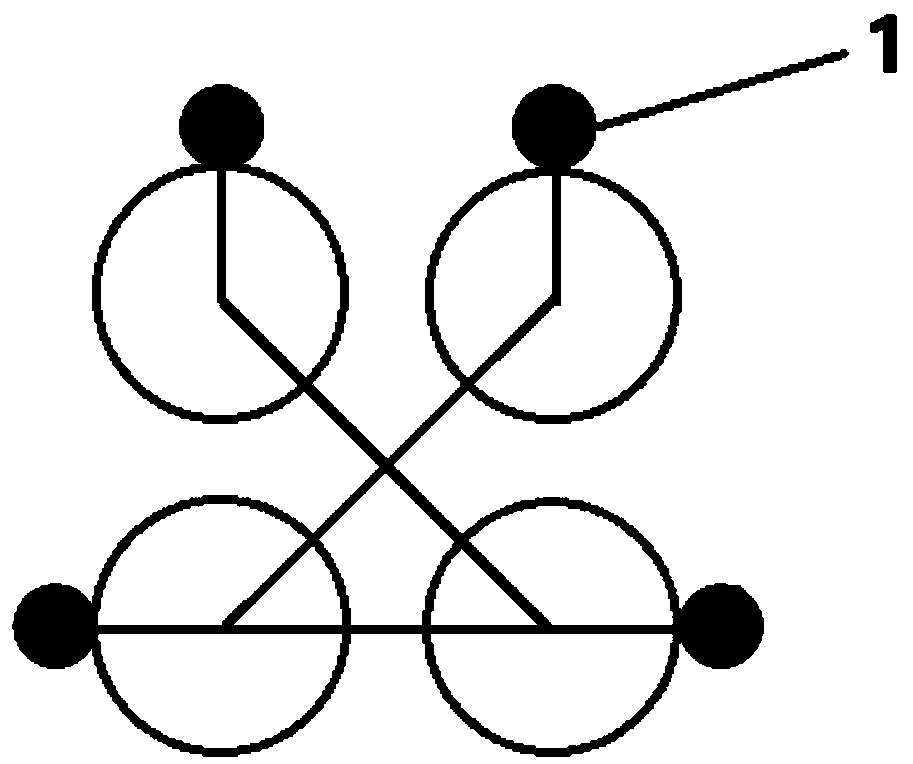
[0056] In order to collect the typical position of each UAV and reduce the deviation of the collection amount, preferably, the marker balls 1 are symmetrically distributed on the UAV, and the number is 4, 6, or 8.
[0057] In this embodiment, the number of marking balls 1 is 4, and the distribution is as figure 2 Shown.
[0058] figure 1 The diagram also shows a schematic diagram of a pseudo-distributed control architecture adopting a preferred embodiment of the method of the present inv...
Embodiment 2
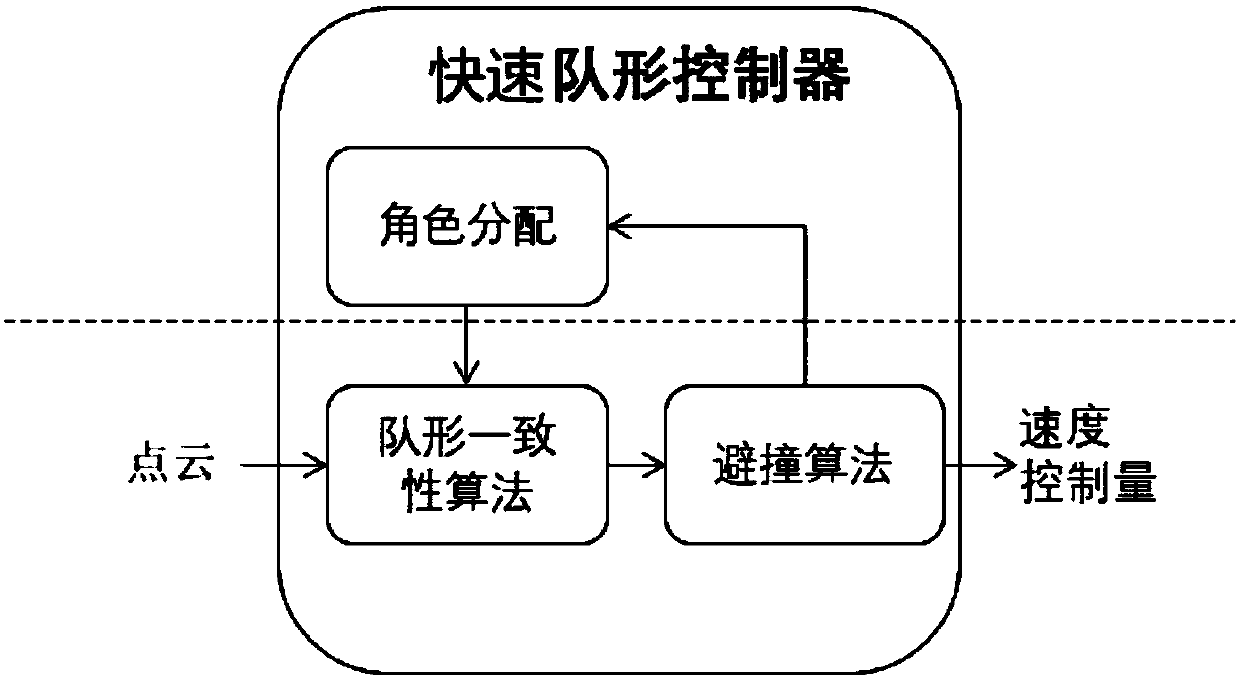
[0065] Such as image 3 Shown in is a schematic diagram of a fast formation controller according to another preferred embodiment of the present invention. The fast formation controller includes the position controller of the ground station and the attitude controller of each UAV; among them, the position controller is used to calculate the target pose of each UAV. Specifically, the position controller calculates the target attitude of each UAV based on the role assignment algorithm, and the attitude controller calculates the motor control amount of each UAV through the formation consistency algorithm. In order to further optimize the formation control of the drones and prevent the drones from colliding during the traveling process, preferably, the fast formation controller also includes a collision avoidance algorithm.
[0066] The design goal of the role assignment algorithm is to establish a one-to-one correspondence between each individual of an unmanned aerial vehicle cluster...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More