

Multi-robot co-localization and fusion mapping method under multi-view in open space
A co-location, multi-robot technology, applied in the field of computer vision, can solve the problems of limited viewing angle for mapping and inability to obtain a global map, and achieve the effect of reducing mapping errors and positioning drift.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific implementation examples described here are only used to explain the present invention, and are not intended to limit the present invention; the drawings are only used for illustrative purposes and cannot be understood as limiting the patent; in order to better illustrate the embodiments, the appended Some components in the drawings may be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art, it is understandable that some known structures and their descriptions in the drawings may be omitted; The described positional relationship is for illustrative purposes only, and should not be construed as a limitation on this patent.
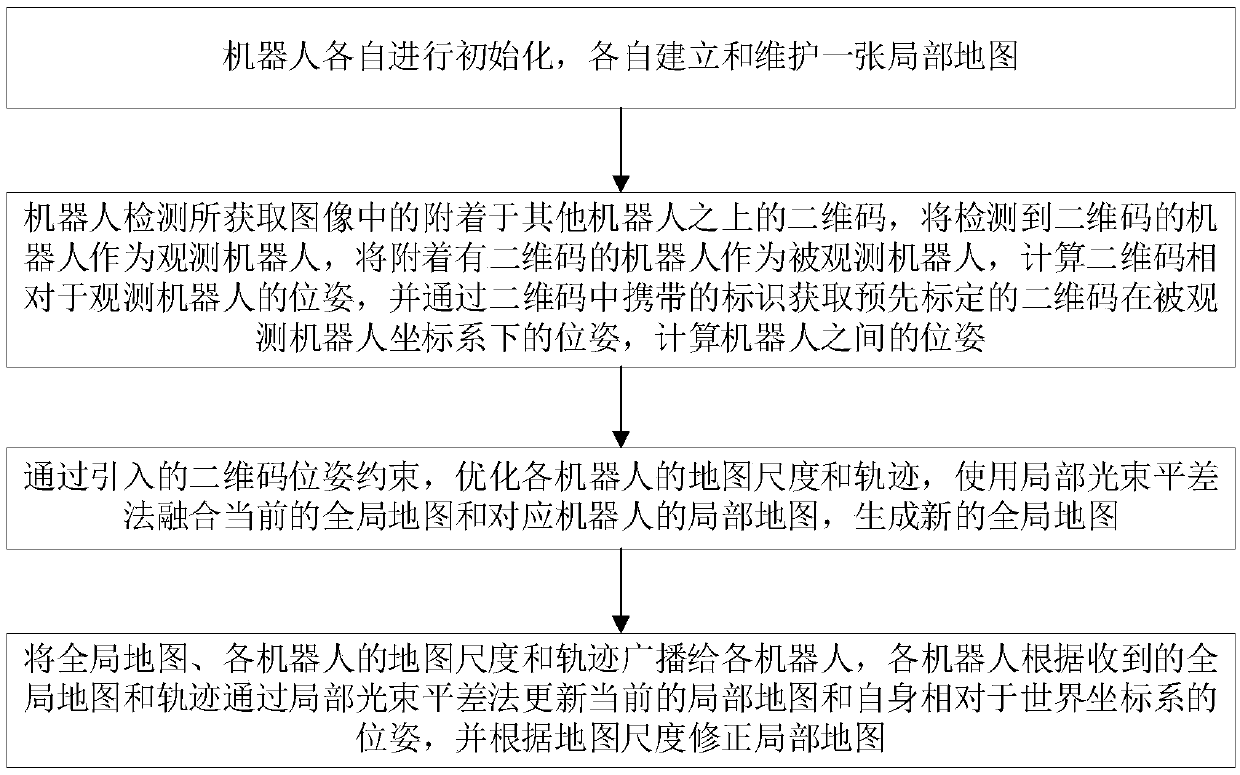
[0037] Based on aerial robots and ground robots to realize multi-robot collaborative positioning and fusion mapping under the multi-v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More