

Intelligent vehicle end-to-end decision method and system orienting expressway scene
A technology for highways and decision-making systems, applied in general control systems, control/regulation systems, instruments, etc., can solve problems that cannot be directly applied to highway scenarios, different internal attributes of vehicles, and large differences, and achieve low cost and stability Driving and time-saving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts belong to the protection scope of the present invention.
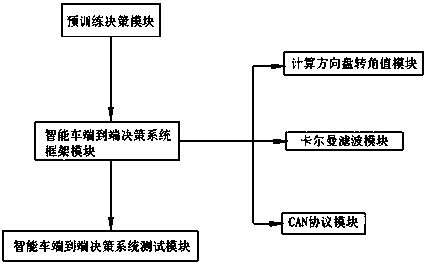
[0038] refer to Figure 1-2 , the present invention provides a technical solution:
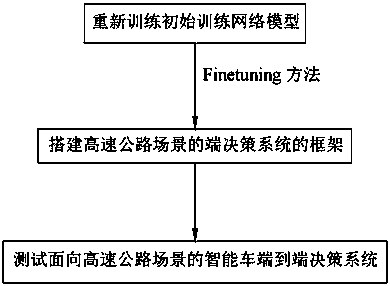
[0039] An end-to-end decision-making method for intelligent vehicles for highway scenarios, such as figure 1 As shown, it mainly includes the following steps:
[0040] The first step is to use the Finetuning method in the transfer learning method to retrain the initial training network model to obtain a decision model, including the following sub-steps:
[0041] Collecting the skilled driver's driving sample under the highway scene is made into...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More