

Apparatus and method for identifying floating objects on water and land boundaries based on vision and lidar
A technology of laser radar and floating objects on the water surface, which is applied in the direction of measuring devices, neural learning methods, character and pattern recognition, etc., can solve problems such as grounding of unmanned ships, inability to accurately distinguish water and land boundaries, damage to unmanned ship hulls, etc., to avoid The effect of a grounded drone ship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
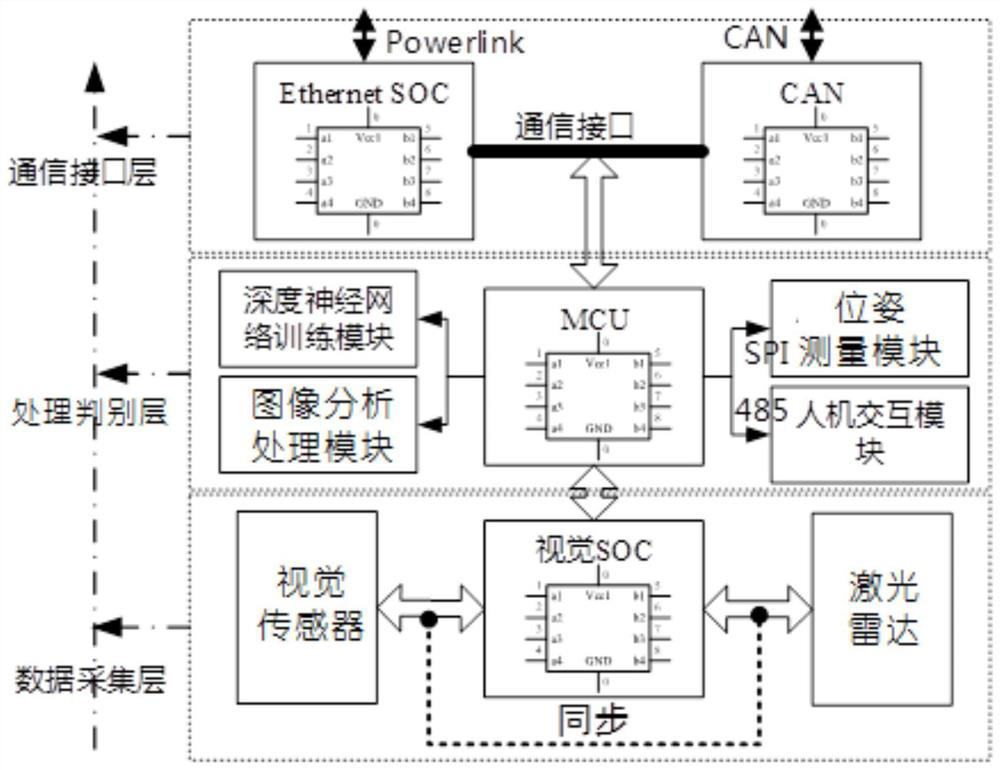
[0031] Such as figure 1 As shown, a detection device based on vision and laser radar for floating objects on the water surface and land boundaries, the device includes a data acquisition layer, a processing discrimination layer and a communication interface layer;
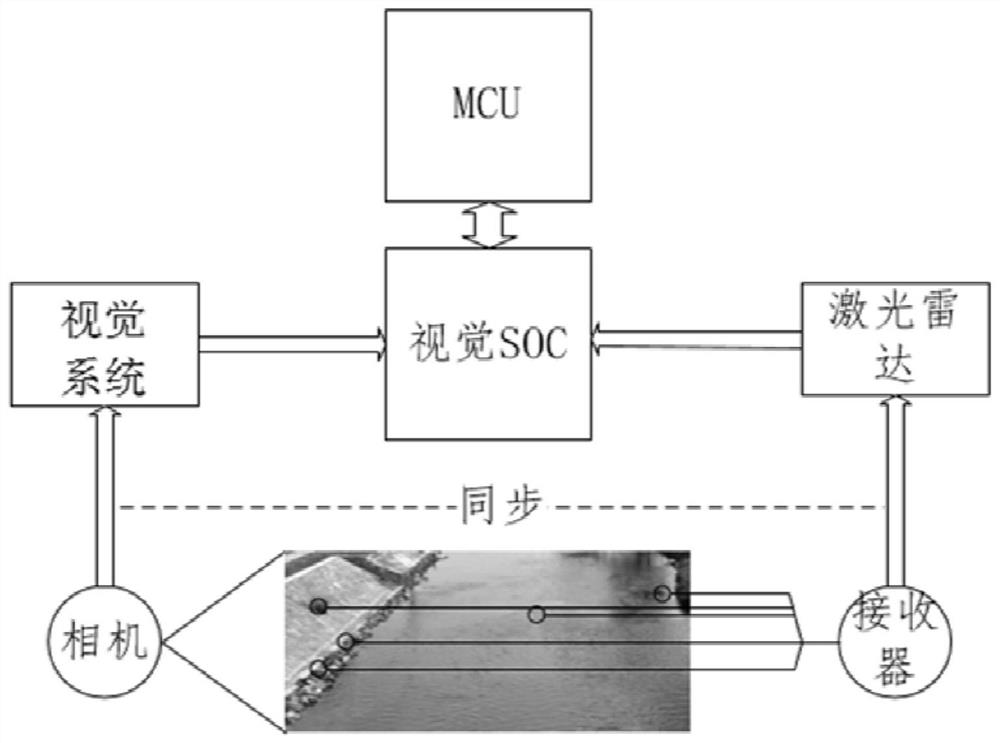
[0032] The data acquisition layer: includes a laser radar, a vision system and a visual processing SOC; the visual SOC realizes the time synchronization of the image data of the vision system and the point cloud data scanned by the laser radar through the broadcast network absolute time and relative time ; The visual system and the laser radar scan and shoot the same river bank and water surface junction area at the same time, and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More