

Intelligent water pipe butt joint method and removing method based on fire extinguishing robot
A technology of fire extinguishing robot and water pipe, which is applied in fire rescue and other fields
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
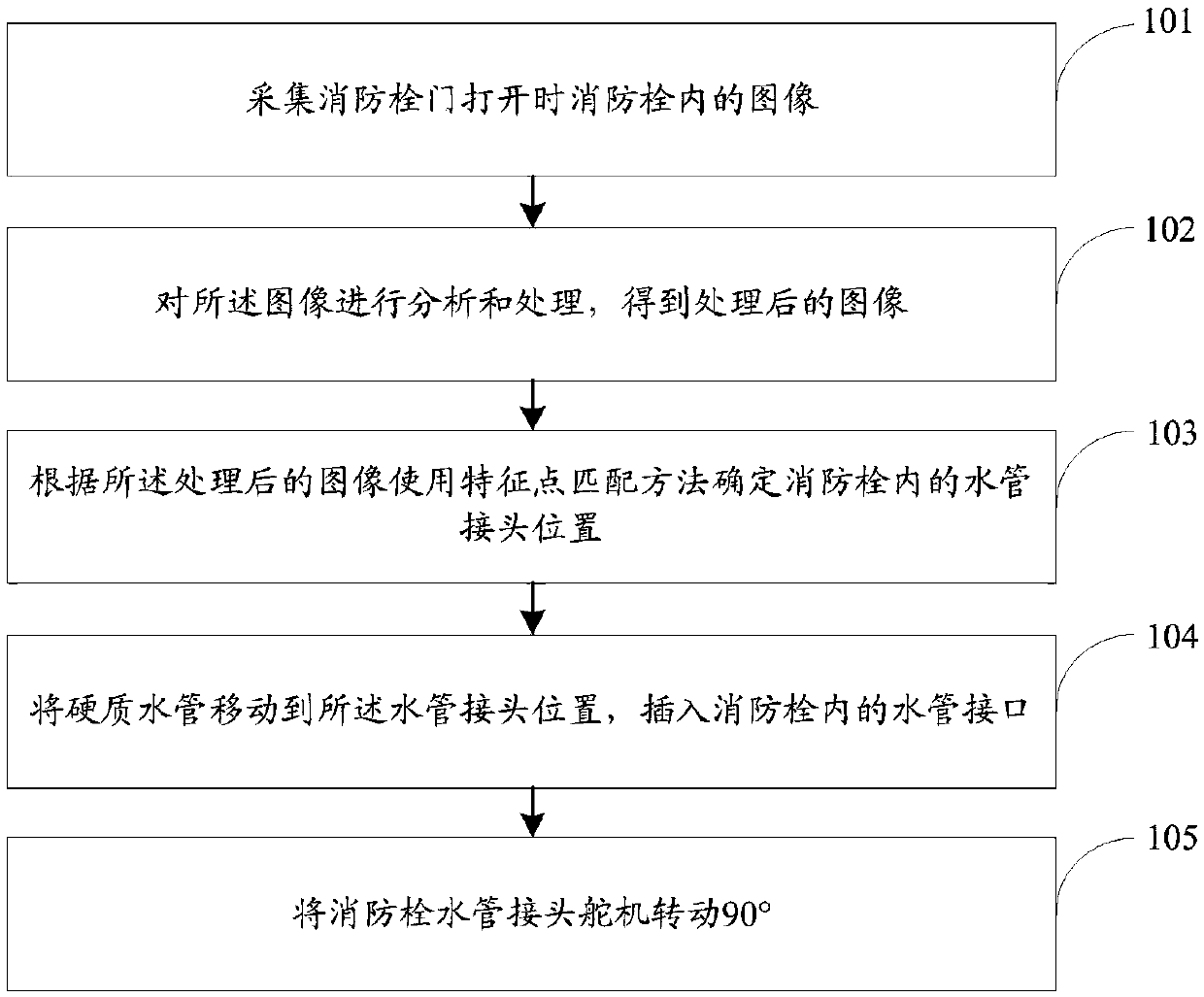
[0090] ① When the fire extinguishing robot arrives directly in front of the fire hydrant and the fire hydrant door is opened, the video acquisition module collects images inside the fire hydrant in real time, and sends the collected image information to the digital signal processor 4d for analysis and processing;
[0091] ②The digital signal processor 4d obtains the picture information in the fire hydrant and uses the feature point matching algorithm to find the three-dimensional world position coordinates of the water pipe joint in the fire hydrant, and the digital signal processor 4d sends the position coordinates of the water pipe joint to the embedded controller 4e;
[0092] ③ After the embedded controller 4e receives the position coordinates of the water pipe joint, according to the known three-dimensional world position coordinates of the fire hydrant hard water pipe 7g on the robot, the embedded controller 4e controls the right mechanical arm through the mechanical claw a...
specific Embodiment 2
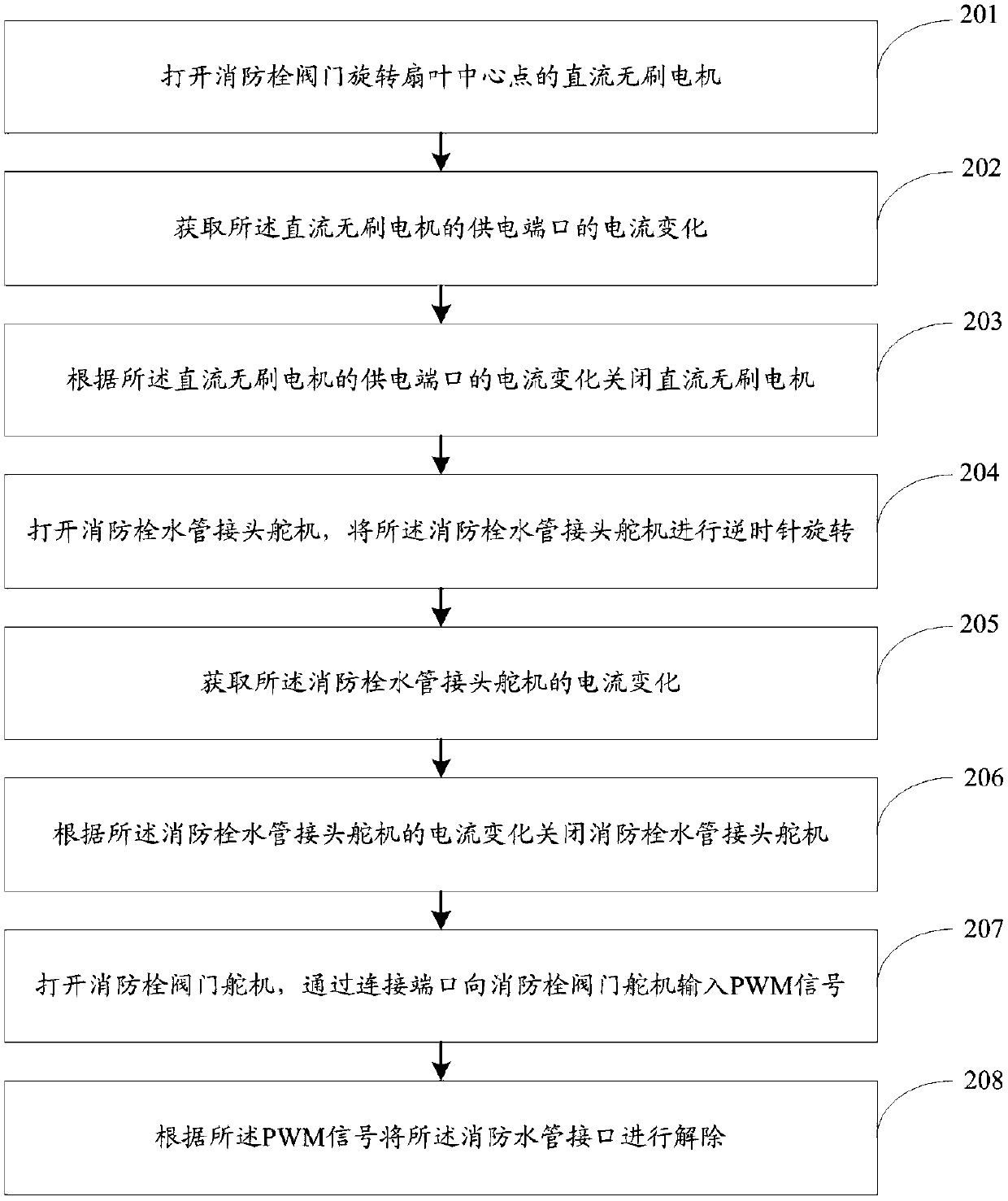
[0100] ① The fire hydrant valve controller 7a sets the power supply port of the brushless DC motor at the center of the rotating blade 7b of the fire hydrant valve to the TRUE state, and the brushless DC motor starts to work.
[0101] ②The DC brushless motor drives the rotating fan blade 7b of the fire hydrant valve to rotate counterclockwise.
[0102] ③The rotary fan blade 7b of the fire hydrant valve rotates to drive the fire hydrant spoke force column 7c which is closely connected with the fire hydrant water flow rotary switch to rotate, thereby performing the closing operation of the fire hydrant rotary switch.
[0103] ④The fire hydrant valve controller 7a monitors the current of the power supply port of the DC brushless motor at the center point of the fire hydrant valve rotating fan blade 7b in real time. When the current changes sharply and is greater than or equal to 200% of the current current, the fire hydrant water flow rotary switch is closed The operation is in p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More