

Full-digital rigid-flexible coupling precise force controlled grinding and polishing device and control method
A rigid-flexible coupling, all-digital technology, applied in grinding automatic control devices, grinding/polishing safety devices, grinding/polishing equipment, etc., can solve the problems of low grinding and polishing accuracy, difficult to control grinding force, etc. Achieve the effect of improving grinding and polishing accuracy, avoiding over-grinding and force overshoot, and realizing adaptive variable force grinding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the objectives, technical solutions and advantages of the present invention clearer, the following further describes the present invention in detail with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
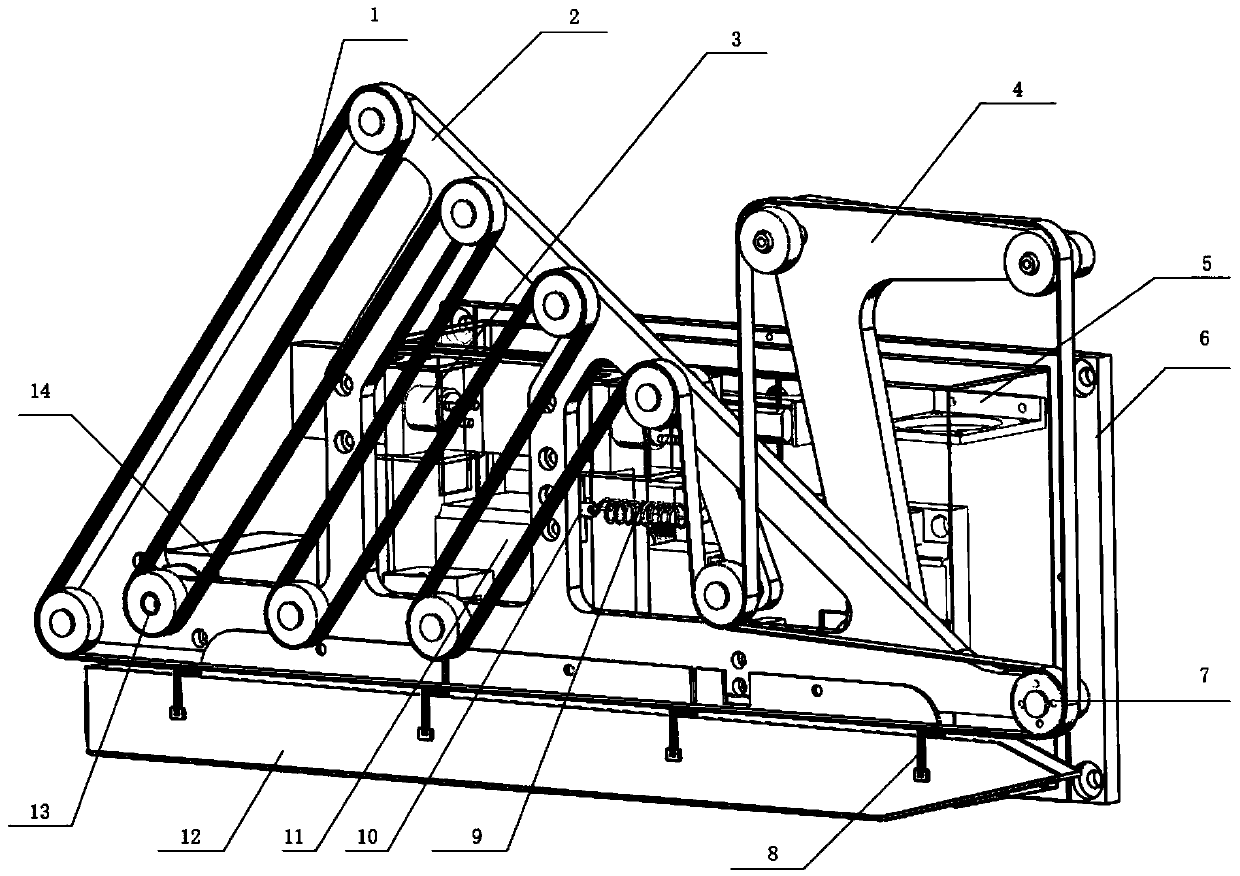
[0049] Such as figure 1 As shown, an all-digital rigid-flexible coupling precision force-controlled grinding and polishing device provided by the example of the present invention includes a one-dimensional linear module servo motion platform, a dust collecting tank 12, a brush 8, a force sensor 3, and a linear slide rail 20. Mounting plate 6. Variable speed compliant grinding and polishing mechanism and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More