

An unmanned pedestrian track prediction method based on a convolutional neural network
A convolutional neural network and unmanned driving technology, applied in the field of computer graphics processing technology and artificial intelligence technology, can solve problems such as less research on unmanned driving systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these examples are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention All modifications of the valence form fall within the scope defined by the appended claims of the present application.
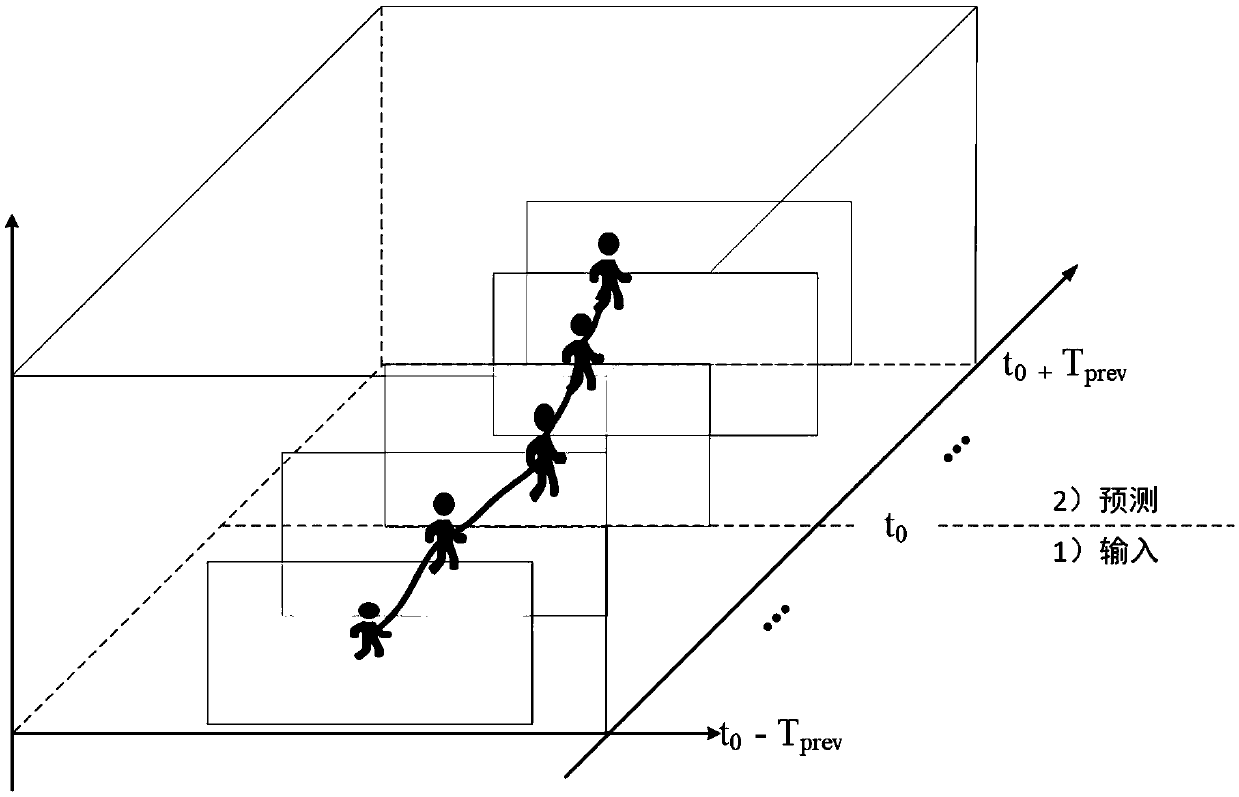
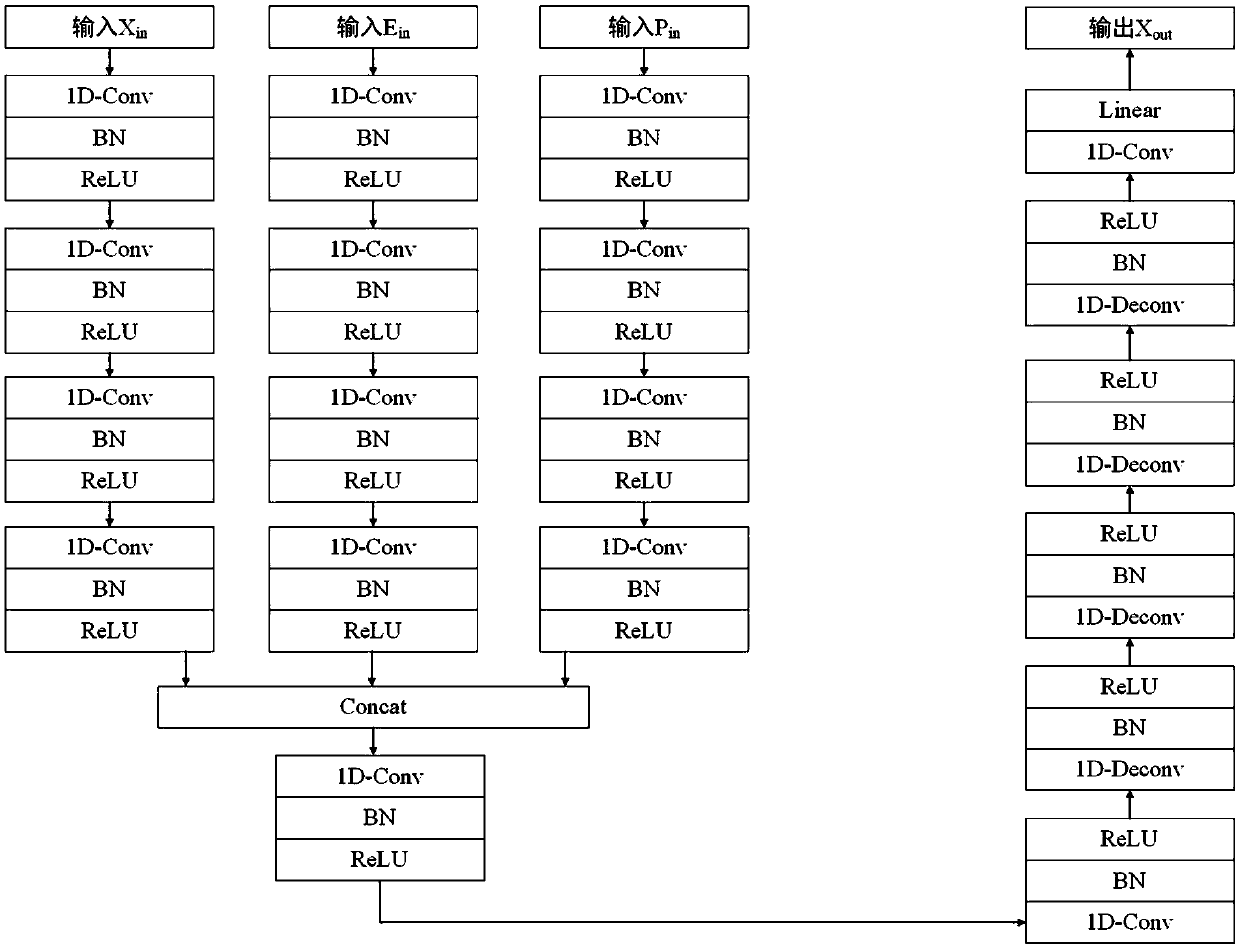
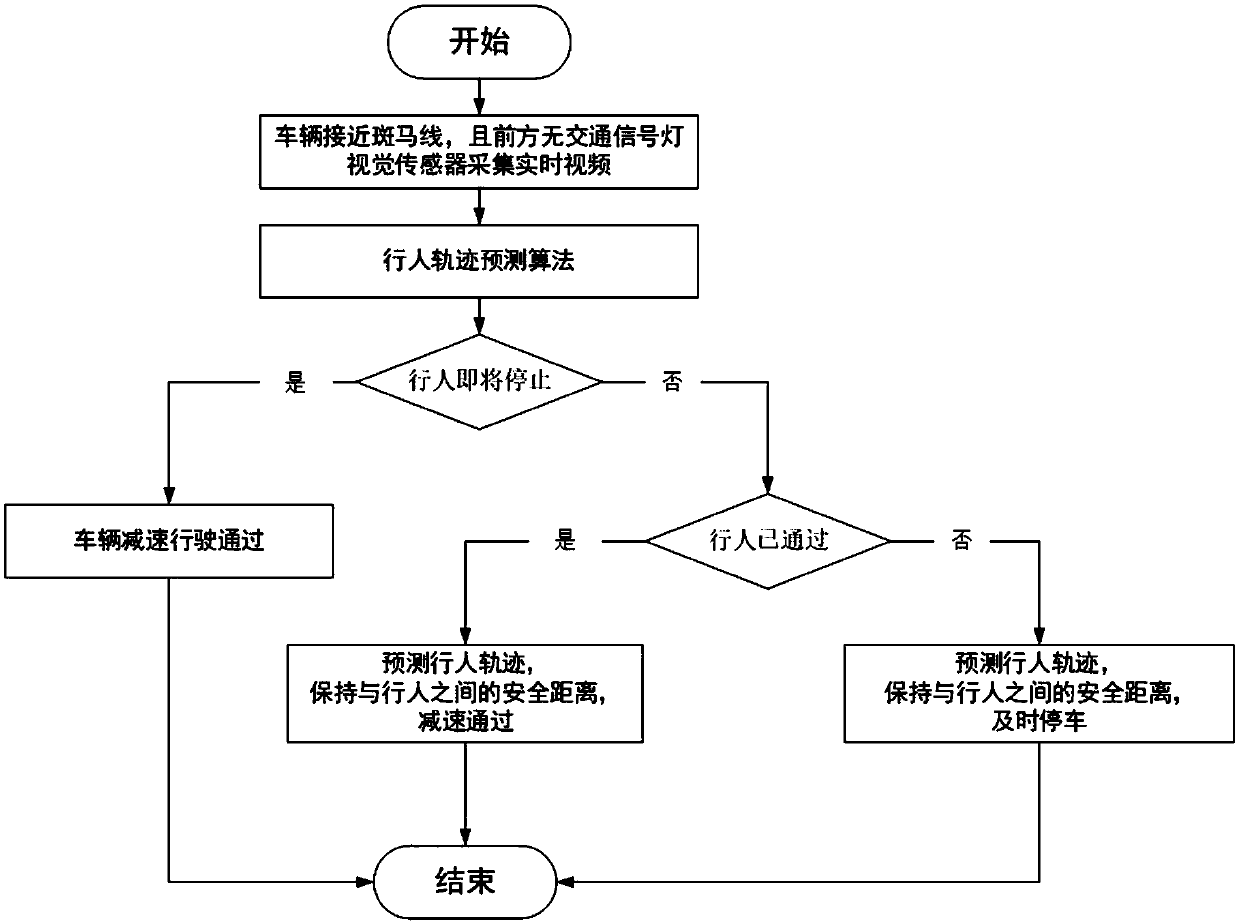
[0041] A Convolutional Neural Network Based Trajectory Prediction Method for Unmanned Pedestrians, such as Figure 1-3 As shown, when the unmanned vehicle is driving and there are no traffic lights in front, it predicts the actions of pedestrians who are about to pass the zebra crossing and the trajectory for a period of time in the future, and adopts a corresponding driving plan to avoid the unmanned vehicle from colliding with pedestrians. A traffic accident occurr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More