

Autonomous fire fighting robot device and monitoring system
A fire-fighting robot and monitoring system technology, applied in control/regulation systems, instruments, two-dimensional position/channel control, etc., can solve problems such as unsuitability, high power consumption, difficulty in detecting fire smoke and dark fire, etc. To achieve the effect of novel structure and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
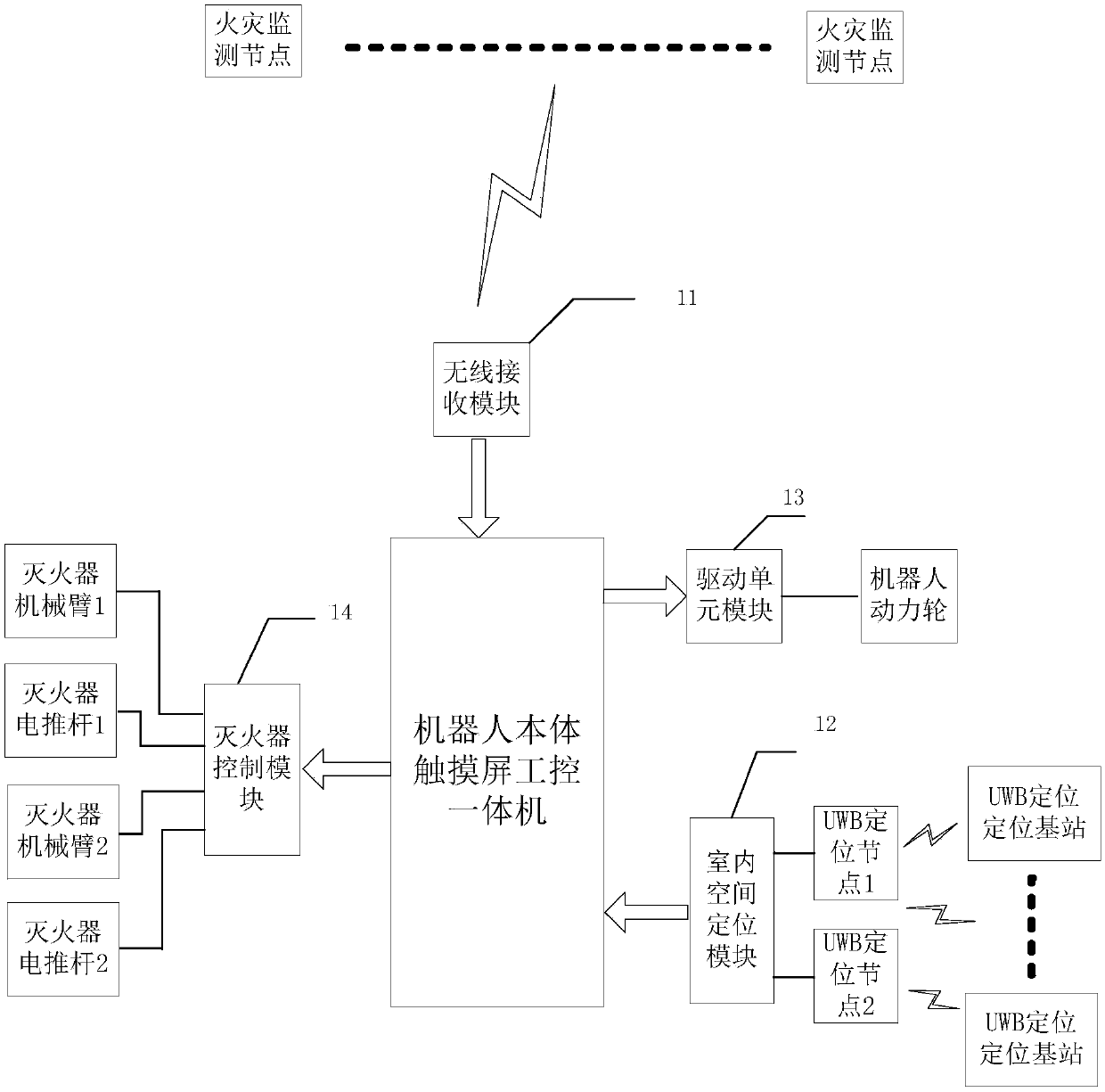
[0029] figure 1 It shows a schematic structural diagram of an autonomous fire-fighting robot device provided by an embodiment of the present invention, as shown in figure 1 As shown, the device includes a robot industrial control integrated machine body and a wireless receiving module 11 controlled by the industrial control integrated machine, a space positioning module 12 , a drive unit module 13 and a fire extinguisher control module 14 .
[0030] Among them, the wireless receiving module 11 is used to receive the fire point alarm information and monitoring node coordinate information sent by the outside world; the spatial positioning module 12 is used for the spatial coordinate positioning of the robot, and is determined according to the coordinate information determined by the UWB positioning node that the robot has. The current position coordinates of the robot, through the current position coordinates and the monitoring node coordinates, plan the optimal path from the cu...
Embodiment 2
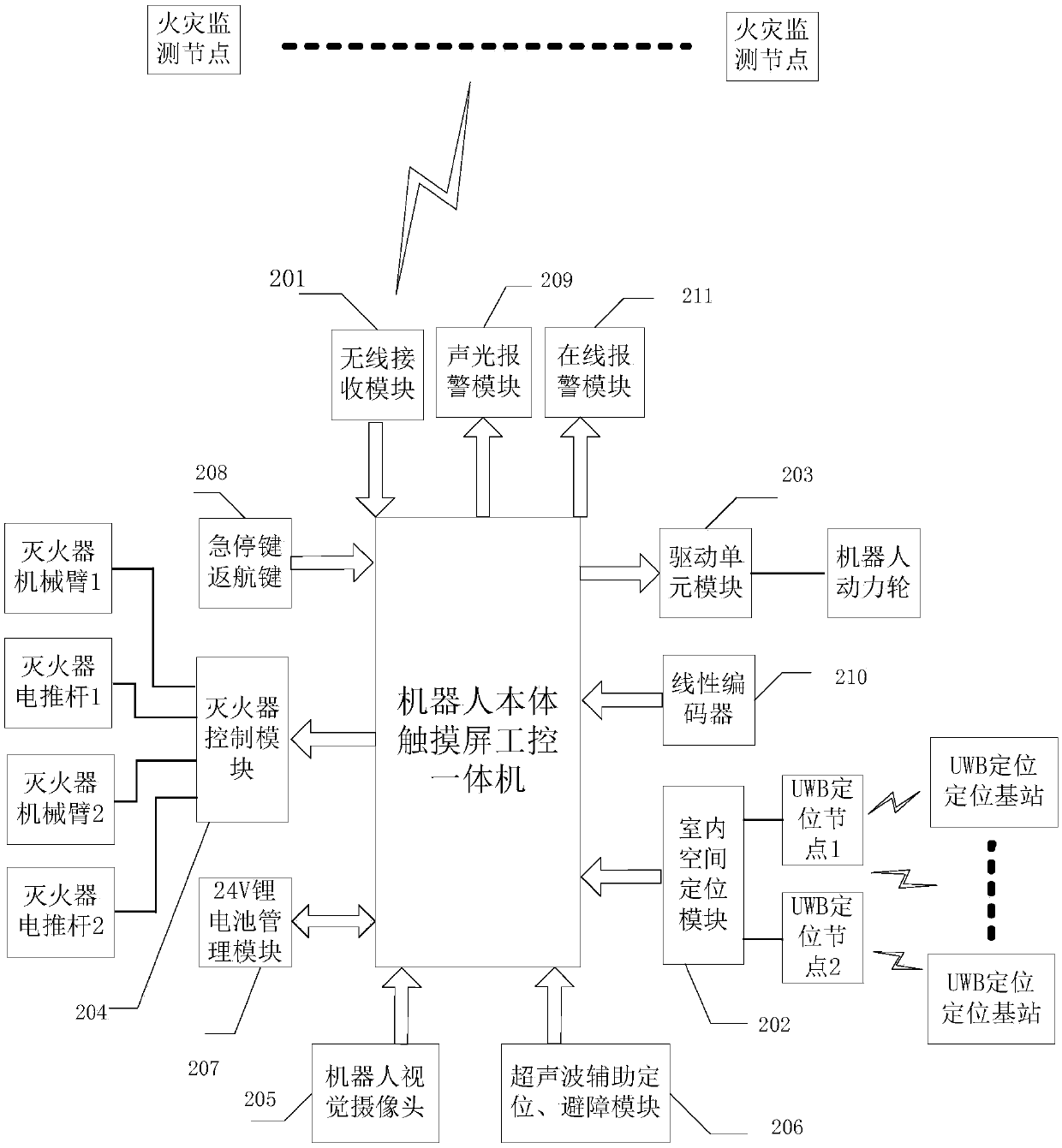
[0035] figure 2 A schematic structural diagram of an indoor autonomous fire-fighting robot device provided by an embodiment of the present invention is shown, as shown in figure 2 As shown, the fire fighting robot device includes a robot industrial control integrated machine body and a wireless receiving module 201 controlled by the industrial control integrated machine, a space positioning module 202, a drive unit module 203, a fire extinguisher control module 204, a visual camera 205, and an auxiliary positioning and obstacle avoidance module 206 , battery management module 207 , emergency stop and return key module 208 , sound and light alarm module 209 , linear encoder 210 , and online alarm module 211 .
[0036] The wireless receiving module 201 is used to receive the fire point alarm information and the monitoring node coordinate information sent by the outside; the spatial positioning module 202 is used for the spatial coordinate positioning of the robot, and determin...
Embodiment 3
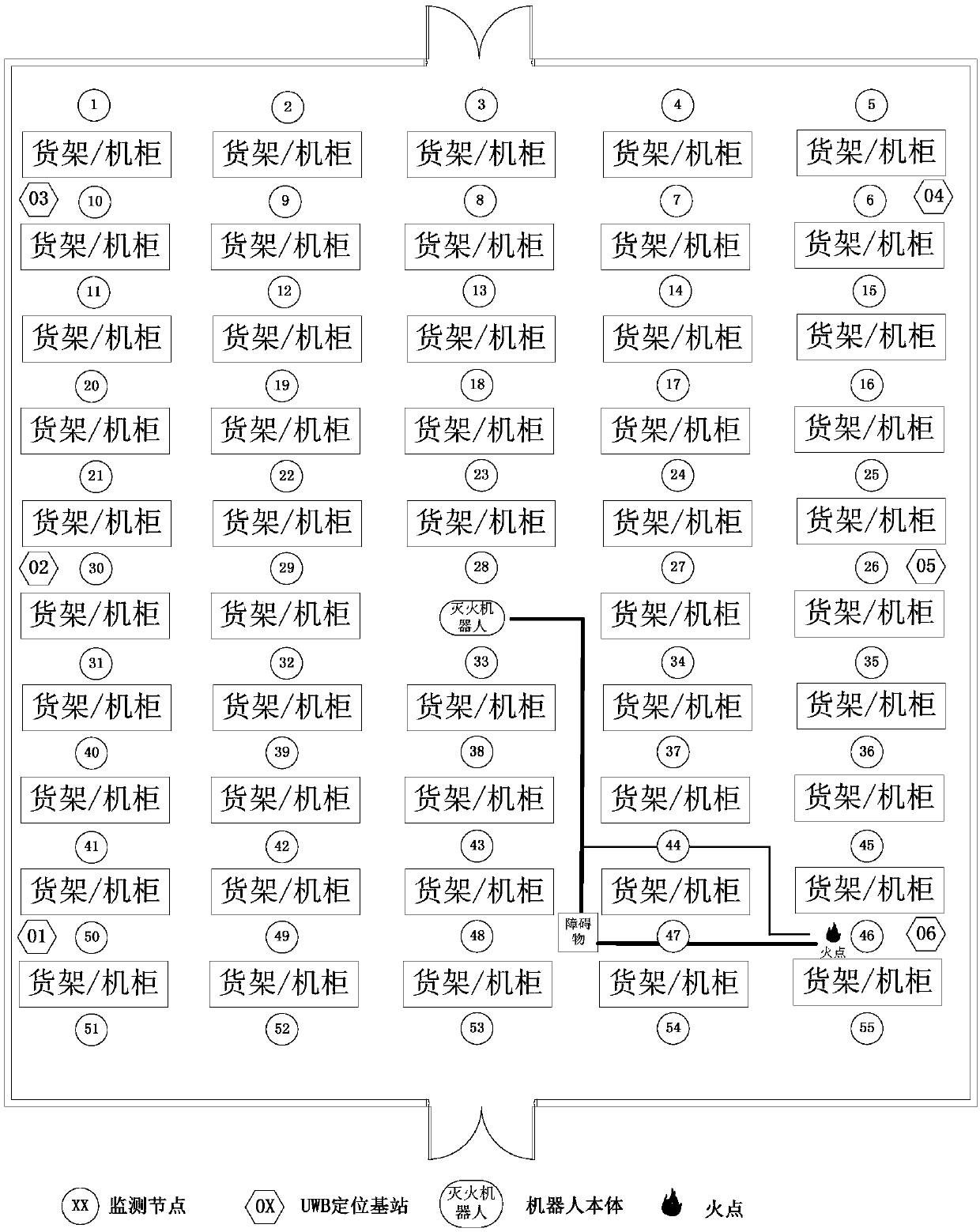
[0047] Figure 5 A schematic diagram showing the structure of a monitoring system with an autonomous fire-fighting robot device provided by an embodiment of the present invention, as shown in Figure 5 As shown, the monitoring system includes a networked fire point monitoring device 50 and a fire-fighting robot device 51 . The networked fire point monitoring device 50 is used to send the fire point information and fire point coordinate coding information to the robot device through the ZigBee processor after detecting suspected fire point information. The fire-fighting robot device 51, after receiving the fire point information sent by the fire point monitoring device, automatically and quickly reaches the area near the fire point according to the optimal path designed in advance, and then searches for the exact fire point position through its own visual camera, and controls the electric actuator of the fire extinguisher Turn on the fire extinguisher, and use the servo robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More