

Laser radar positioning method on basis of scanning line segment coincidence length estimation
A technology of laser radar and positioning method, which is applied in the direction of radio wave measurement systems and instruments, can solve the problems of inaccurate positioning, achieve high robustness, reduce the amount of calculation, and improve timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
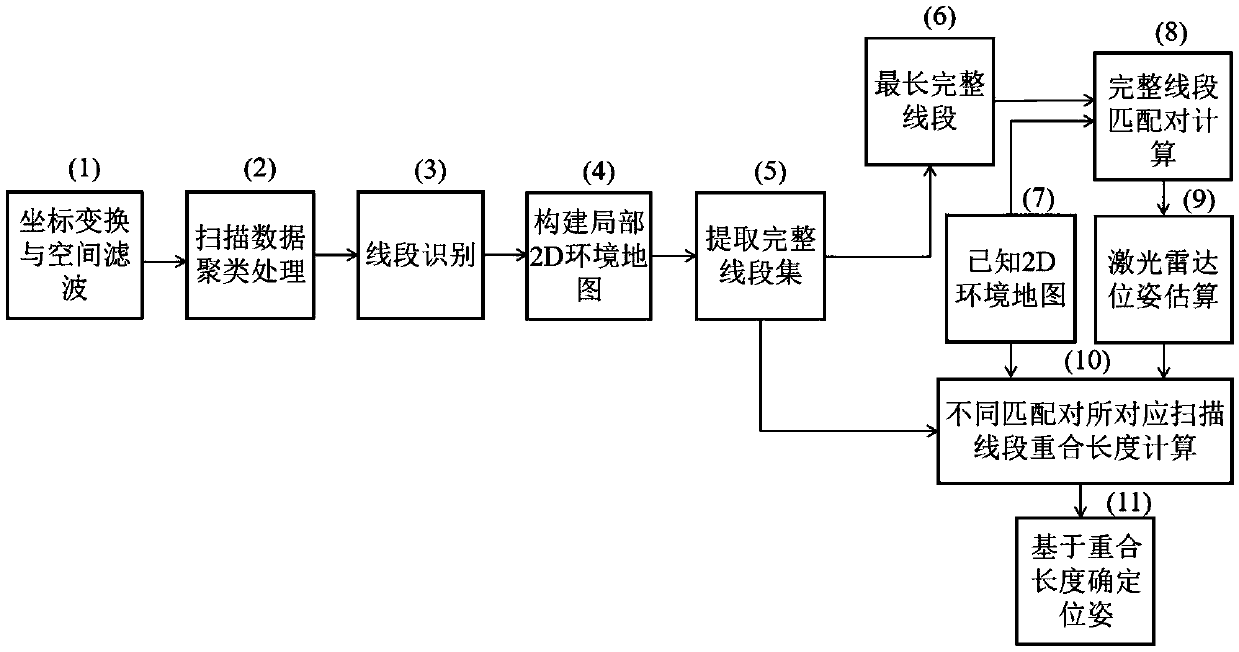
[0016] like figure 1 As shown, the lidar positioning method based on the estimation of the coincidence length of scanning line segments includes the following steps:
[0017] Step 1. Perform coordinate transformation and spatial filtering on the raw data scanned by the lidar;
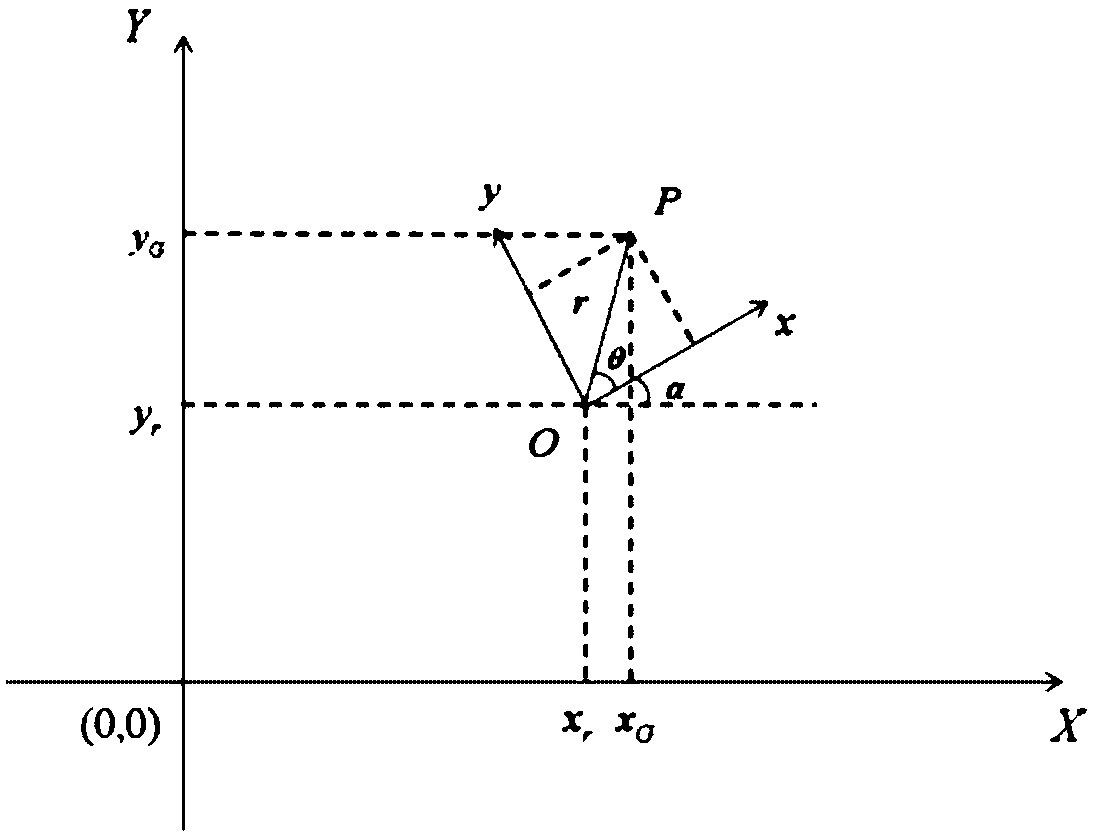
[0018] Coordinate transformation and spatial filtering: The original data points acquired by the single-line lidar are ranging values and corresponding scanning angles, so the data representation is expressed in polar coordinates, that is, in the form of (r, α). For the subsequent environment map construction, the first thing we need to do is to coordinate transform the local raw data acquired by the lidar, and transform its polar coordinates into rectangular coordinates, such as figure 2 The local Cartesian coordinate system of the laser radar is e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More