

Method for detecting the grabbing position of a robot target object
A technology for target objects and robots, which is applied in the field of robot target object grasping position detection, and can solve problems such as low efficiency and inability to segment objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
[0061] An embodiment of the present application provides a non-volatile computer storage medium, the computer storage medium stores at least one executable instruction, and the computer executable instruction can execute a robot target object grasping in any of the above method embodiments The method of location detection.
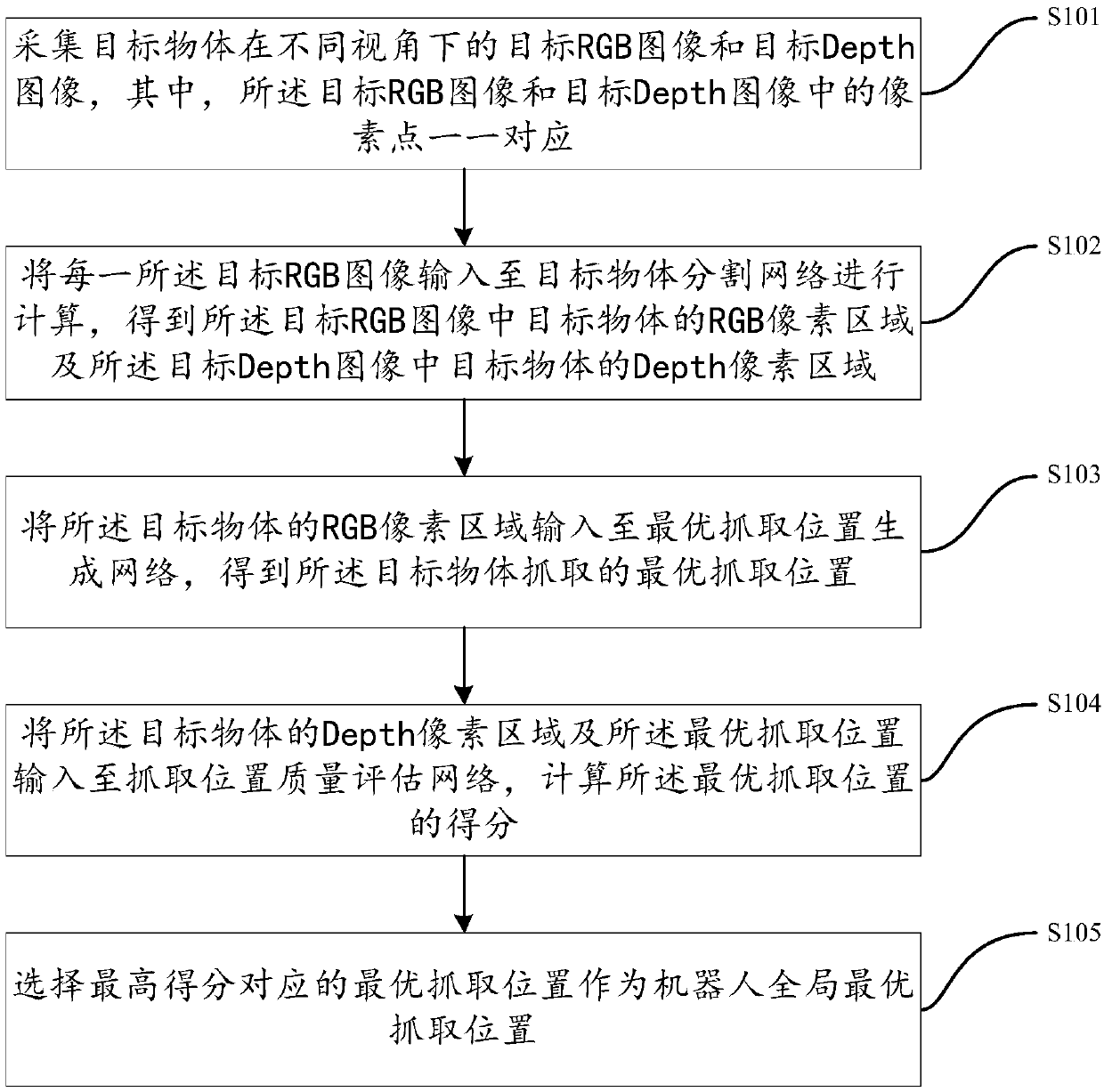
[0062] figure 1 It is a flow chart of an embodiment of a method for detecting a grasping position of a robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More