

A sweeping robot obstacle avoidance processing method based on free move technology
A sweeping robot and processing method technology, applied in manual sweeping machinery, carpet cleaning, floor cleaning, etc., can solve the problems of insufficient obstacle avoidance performance, inability to meet the needs of use, and low degree of intelligence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
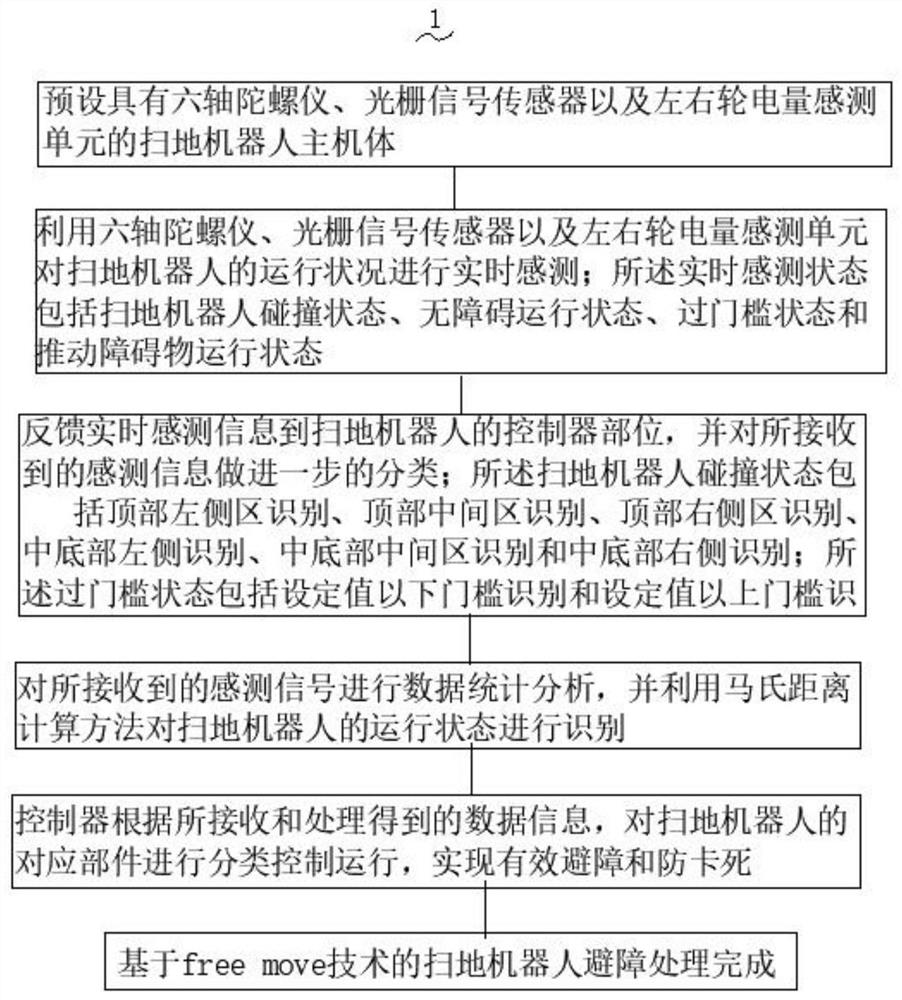
[0022] see figure 1 According to the present invention, a sweeping robot obstacle avoidance processing method 1 based on free move technology includes the following steps,
[0023] S1: The main body of the sweeping robot is preset with a six-axis gyroscope, a grating signal sensor, and a power sensing unit for the left and right wheels;
[0024] S2: Use the six-axis gyroscope, the grating signal sensor and the power sensing unit of the left and right wheels to sense the running status of the sweeping robot in real time; the real-time sensing state includes the collision state of the sweeping robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More