

Dynamic grabbing device applicable to mechanical arm
A technology of grabbing device and mechanical arm, which is applied in the field of dynamic grabbing devices, can solve the problems that the robot's range of motion cannot be used freely, and achieve the effects of improving the operating rhythm, simple structure, and saving conversion time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
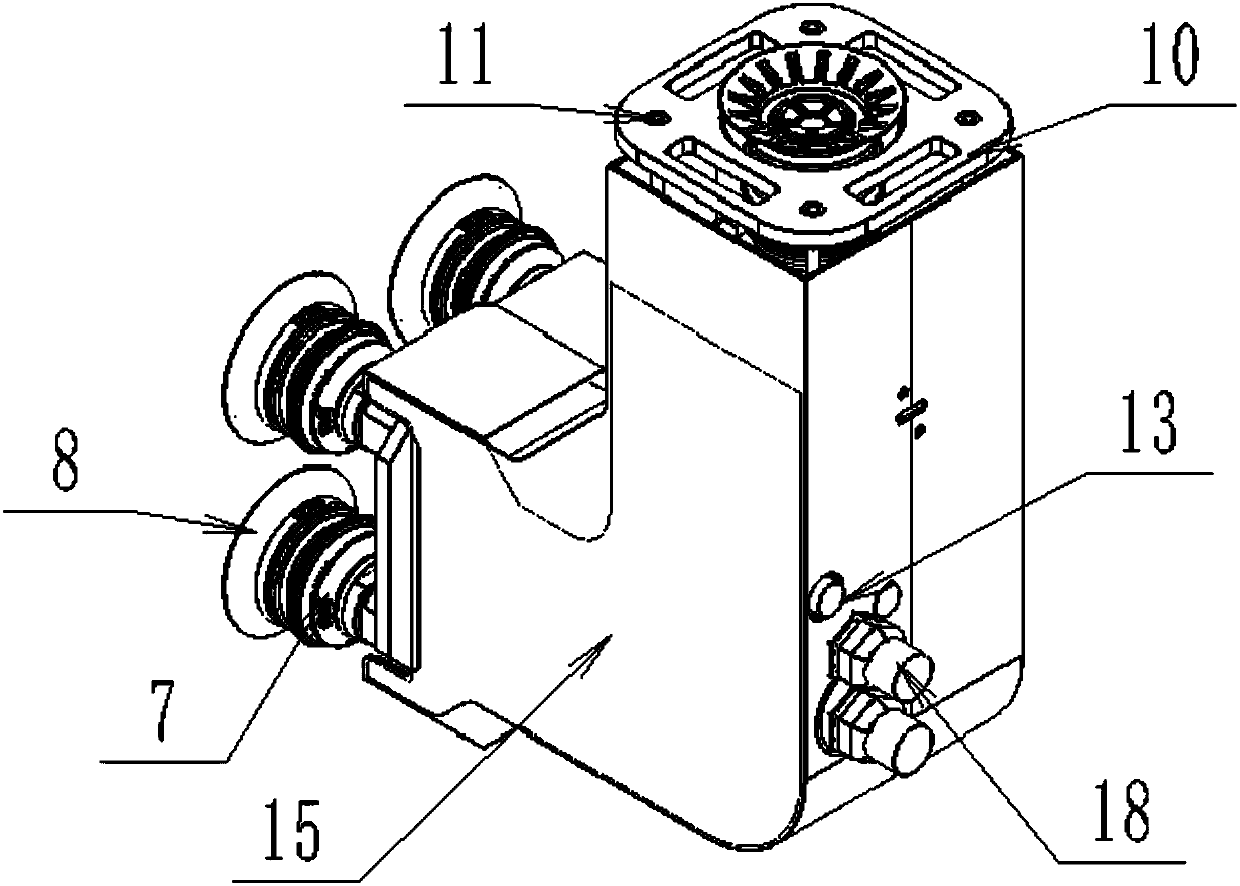
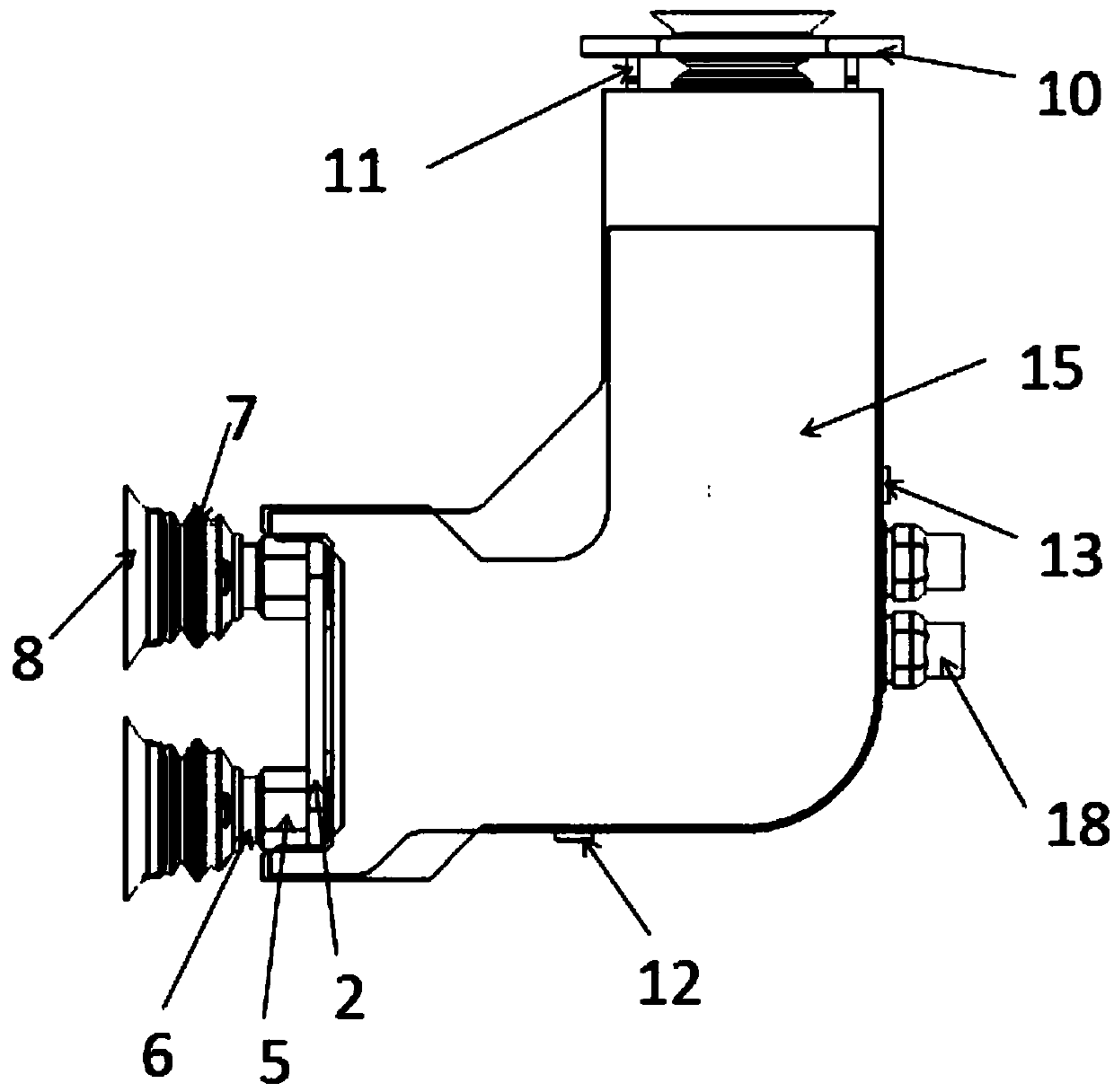
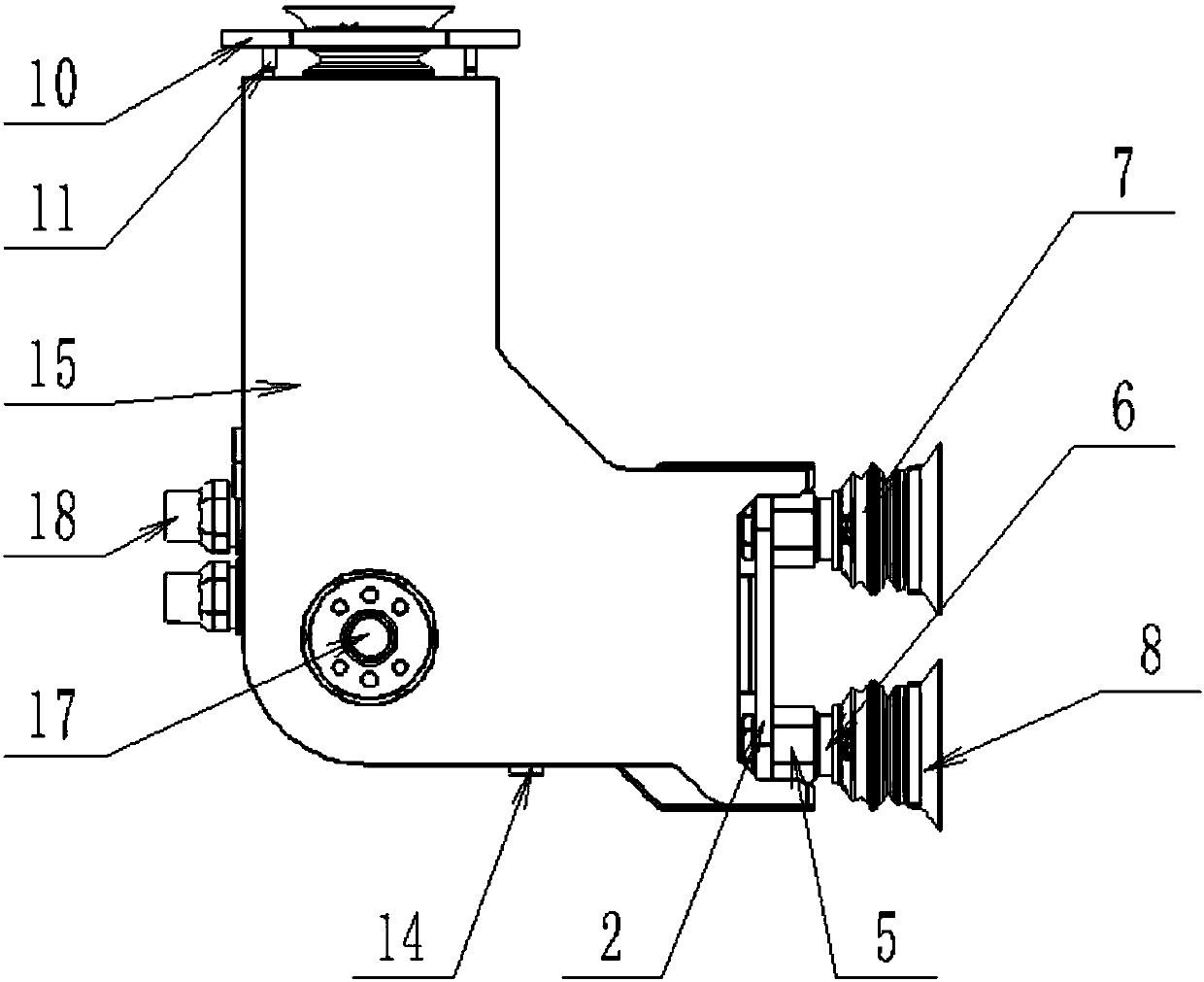
[0023] The present invention is specifically described below in conjunction with accompanying drawing, as Figure 1-8 As shown, a dynamic grasping device used on a mechanical arm includes a support plate (1), one end of the support plate (1) is fixedly connected with four large suction cup mounting plates (2), and the four large suction cup mounting plates are (2) Four groups of suction cup mounting mechanisms are arranged at the four corners on the surface, and each group of suction cup mounting mechanisms is fixedly installed on the mounting holes (3) on the surface of the four large suction cup mounting plates (2), and one end thereof is inserted into the installation hole (3). The brass quick-change joint (4) in the hole (3), the assembly joint (5) installed at the other end of the brass quick-change joint (4), the support body (6) installed at one end in the assembly joint (5) , the wave expansion joint (7) installed on the support body (6), and the disk type suction cup ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More