

Robot loading and unloading operation method based on vision positioning
A robot and robot hand technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of affecting work rhythm, photographing occlusion, and high cost, reducing tooling and labor costs, improving equipment operating rhythm, and improving productivity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Preferred embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure can be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the disclosure to those skilled in the art.
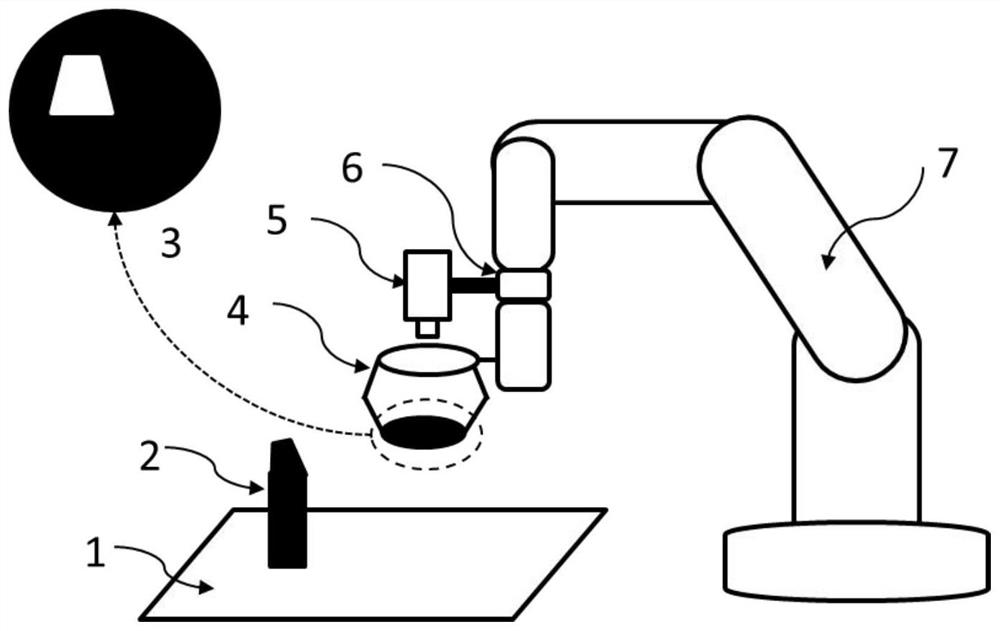
[0031] as attached figure 1 As shown, it is an exemplary embodiment of the present invention to load and unload the core parts of the automobile recliner on the welding table according to a fixed posture.
[0032] The specific requirement is to insert the positioning hole of the core part into the positioning pin of the welding table, that is, the blanking pin. Among them, the section of the positioning hole and the blanking pin of the cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More