

A control system and control method of an intelligent citrus picking machine
A control system and control method technology, applied in the direction of picking machines, program-controlled manipulators, manipulators, etc., can solve the problems of citrus damage and low picking efficiency, and achieve the effects of reducing damage rate, increasing picking efficiency, and realizing automatic intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
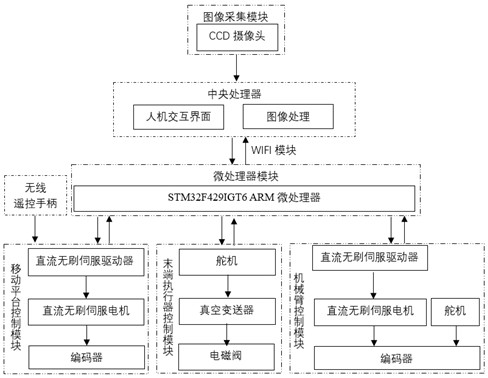
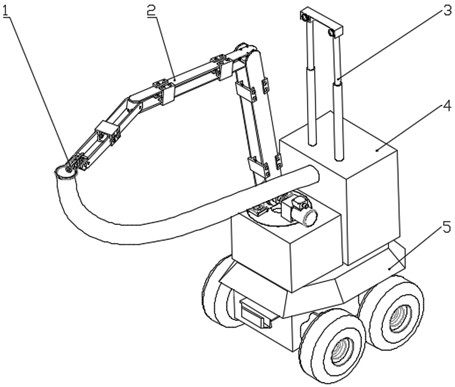
[0062] A control system for an intelligent citrus picking machine, such as figure 1 As shown, it includes a mobile platform control module for controlling the movement of the mobile platform 5, a mechanical arm control module for controlling the movement of each joint of the mechanical arm 2 on the mobile platform 5, and an end effector for controlling the front end of the mechanical arm 2. 1 The end effector control module for picking citrus, the image acquisition module for collecting citrus images 3, the microprocessor module for controlling and coordinating the work of each module and the central processing unit connected with the microprocessor module through the communication module; the microprocessor The controller module and the central processing unit can be connected through a cable, or can be connected through a 4G network and a WIFI module, and are not limited to the WIFI connection communication method described in detail later in this embodiment. Described image...
Embodiment 2
[0086] A control method adopting the control system of the intelligent citrus picking machine described in embodiment 1 is characterized in that: comprising the following steps:
[0087] S1: Control the picking machine to a picking point through the wireless remote control handle / man-machine interface / central processor that can automatically plan the driving path of the picking machine, and make judgments through human judgment or real-time monitoring through distance measuring sensors, so that the robotic arm 2 Access to citrus picking range;
[0088] There are two ways to move the picking machine to the designated location in the orchard. 1. Through the wireless mobile remote control handle or human-computer interaction interface, people follow the citrus picking machine and manually control the mobile platform 5, so that the citrus picking machine reaches the designated position in the orchard; 2. On the premise of an electronic map of the orchard, the central processing un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More