

Algorithm, system and device for eliminating unmanned aerial vehicle positioning NLOS, and storage medium
A technology for eliminating systems and drones, applied in the field of communications, can solve the problems of not receiving GPS signals and a large amount of calculation, and achieve the effects of simple calculation steps, accurate positioning results, and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail below in conjunction with specific examples, but the embodiments of the present invention are not limited thereto.
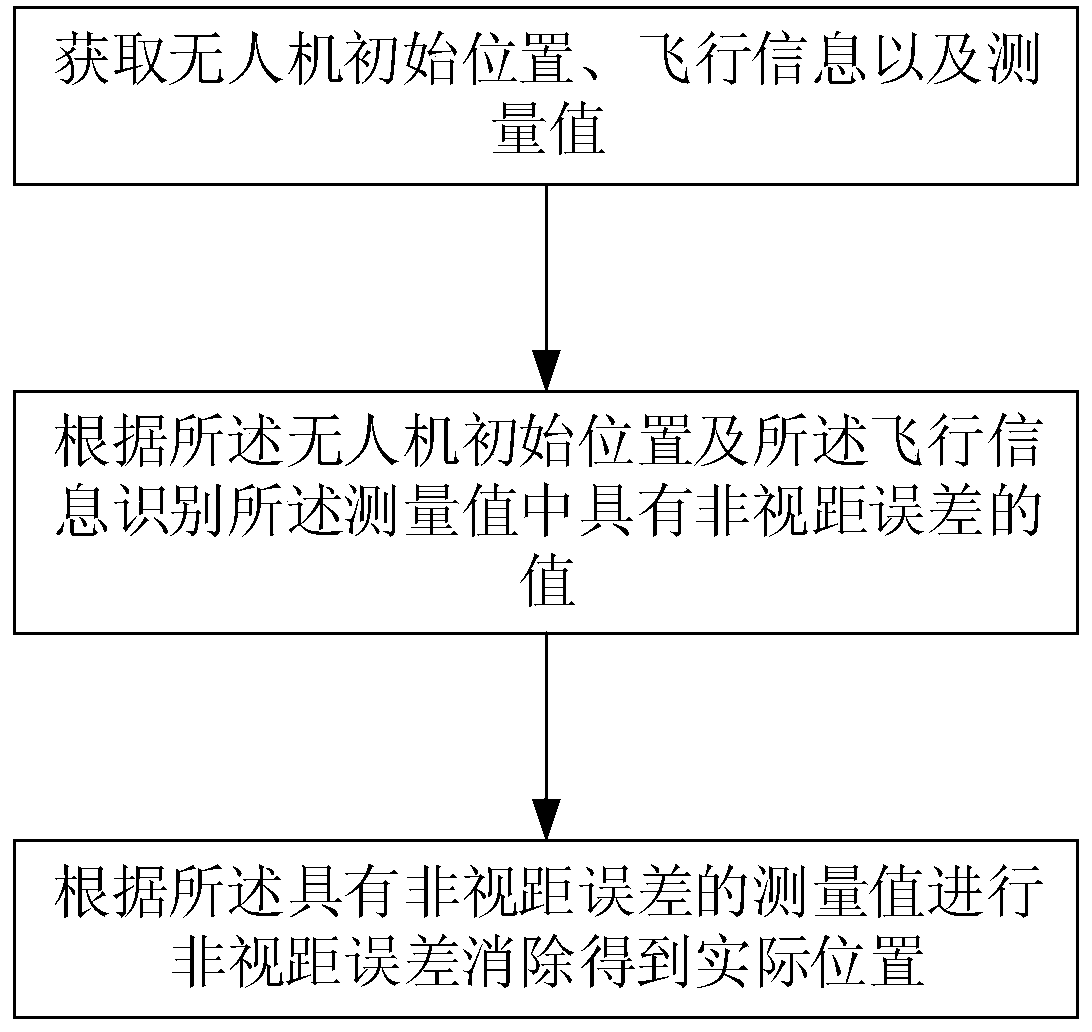
[0047] The embodiment of the present invention provides an NLOS elimination algorithm for UAV positioning. The steps are as follows:
[0048] Obtain the initial position, flight information and measurement values of the drone;
[0049] Identifying a value with a non-line-of-sight error in the measurement value according to the initial position of the drone and the flight information;
[0050] The actual position is obtained by eliminating the non-line-of-sight error according to the measurement value with the non-line-of-sight error.
[0051] Specifically, by first acquiring the measurement value with non-line-of-sight error, the measurement value with non-line-of-sight error can be eliminated, and the measurement value can be processed more accurately, so that the positioning result is more accurate, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More