

A Modular Capture Manipulator Based on Motion Parametabolism
A paramorphic, modular technology, applied in the field of modular capture manipulators, can solve the problems of complex control of the drive part, heavy structure, difficulty in controlling stiffness, etc., achieve good capture performance, high degree of modularization, and low overall quality Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
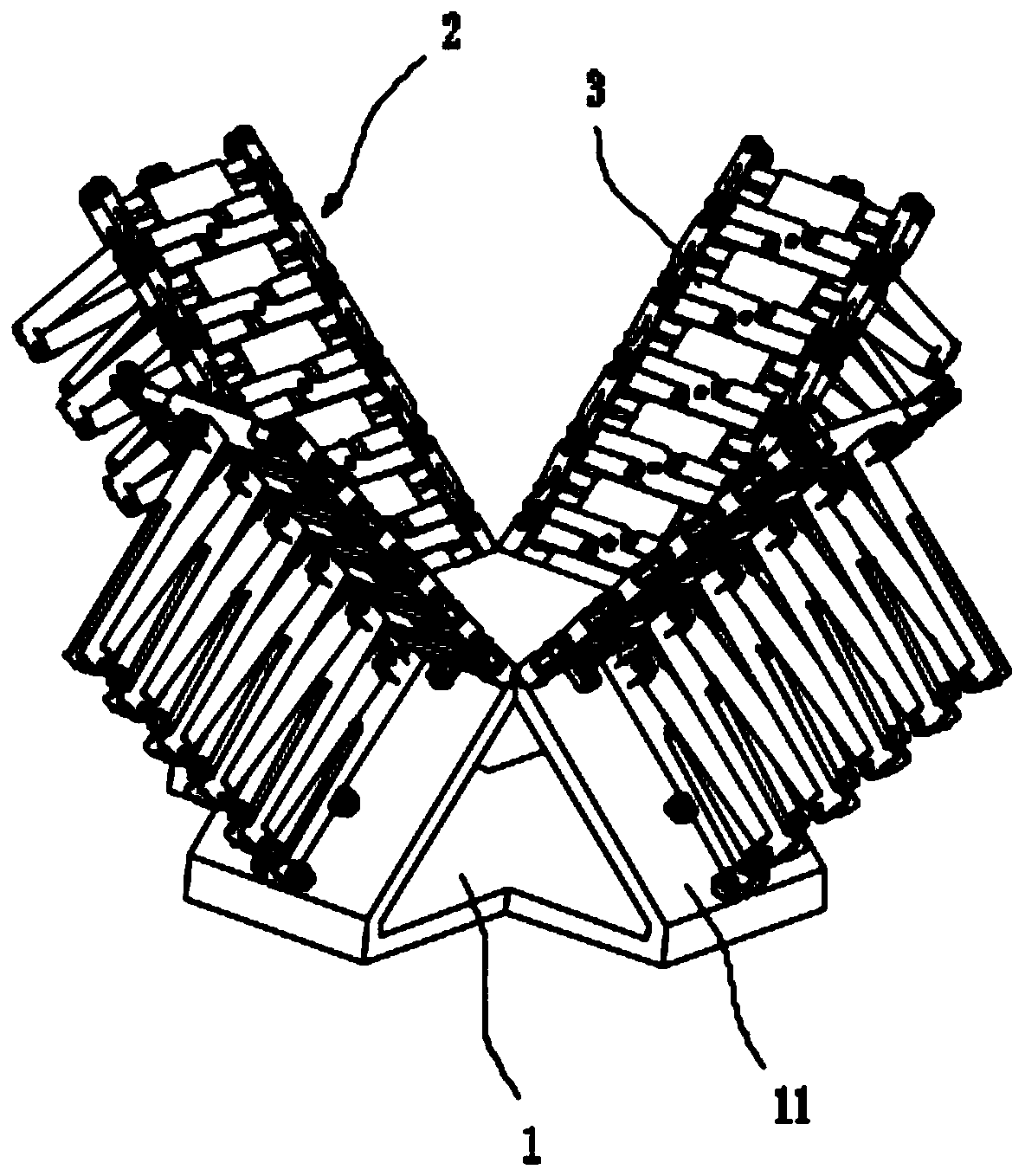
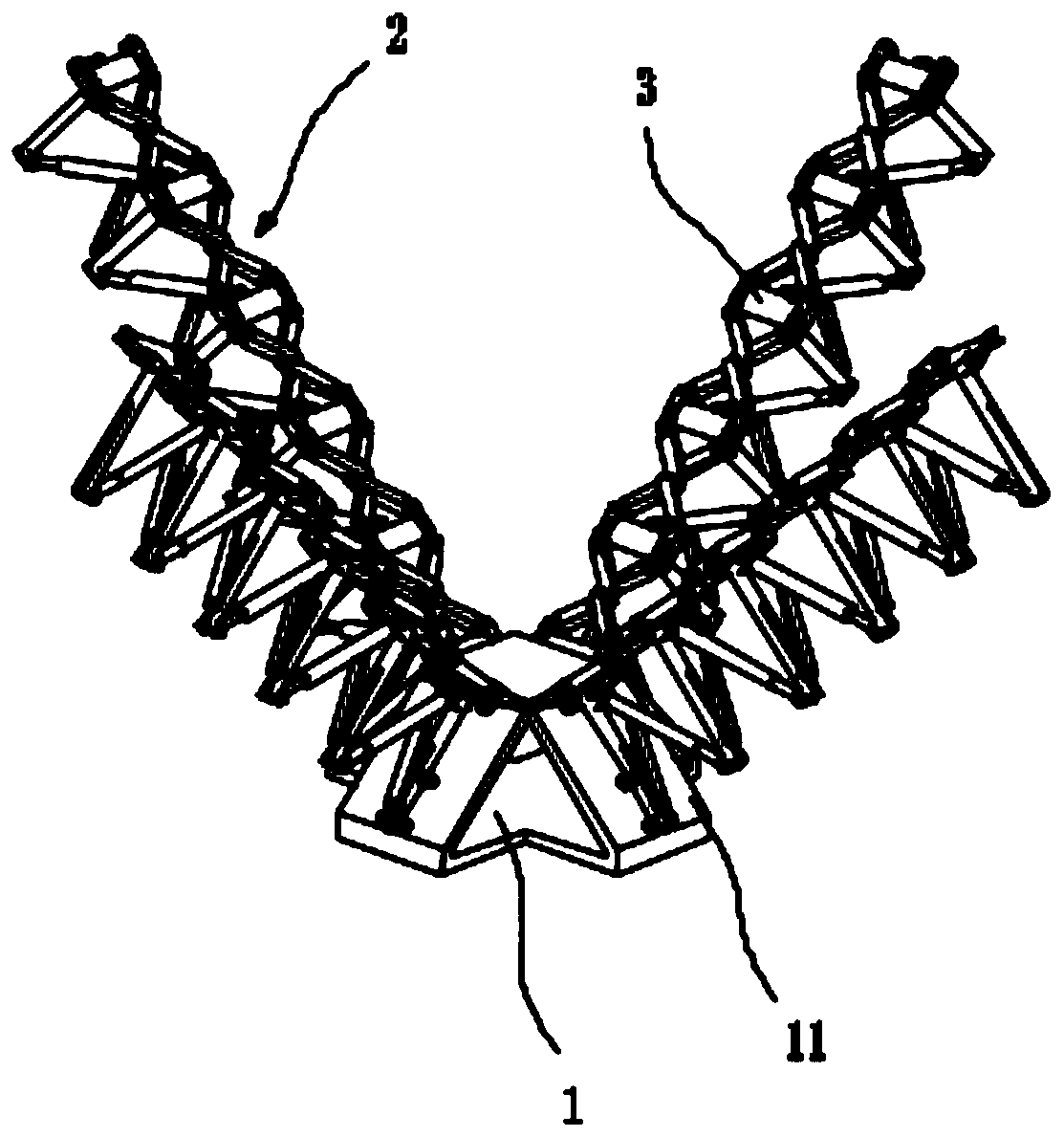
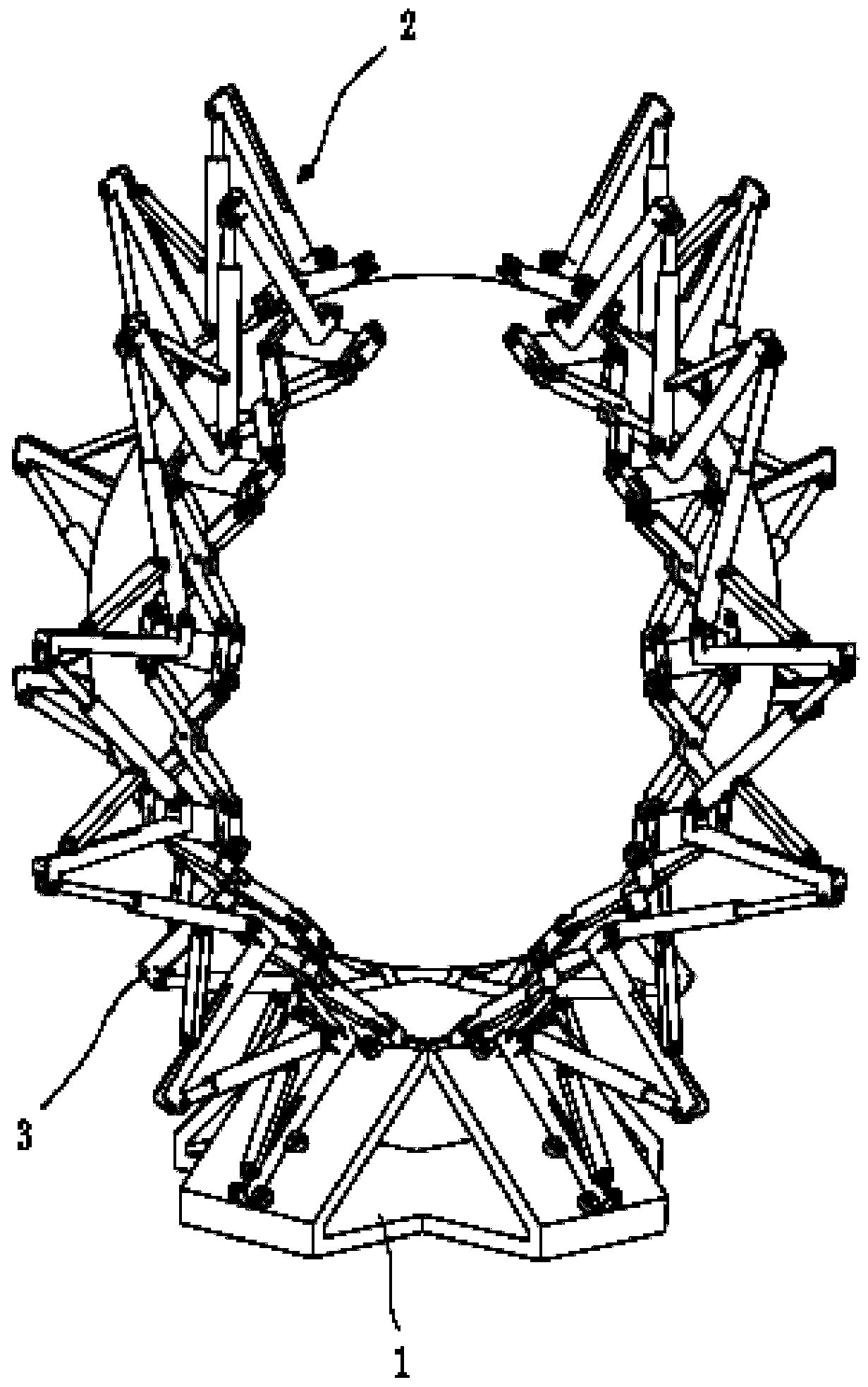
[0058] The present embodiment provides a kind of modular capture manipulator based on motion parametabolism, such as figure 1 -13, including base 1 and four manipulator claws 2.
[0059] Such as figure 1 As shown in -2, four gripper bases 11 corresponding to the installation of the mechanical gripper 2 are arranged on the base 1, and the four gripper bases 11 have installation surfaces inclined relative to the base 1, and the four gripper bases The seats 11 are arranged around the base 1 in a circular array.
[0060] Each claw base 11 is provided with a mechanical claw 2, preferably, the four mechanical claws 2 are identical, and each mechanical claw 2 includes N sequentially connected folding units 3, preferably, the folding units 3 The number is 4-10, and the present embodiment shows the case that the number of folding units 3 is 5.
[0061] Among them, such as Figure 6 As shown, taking a single folding unit 3 as an example, the specific structure of the folding unit 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More