Foot-end adaptive hydraulic quadruped robot
A quadruped robot, self-adaptive technology, applied in the field of robots and hydraulic quadruped robots, can solve the problems of large impact force, easily damaged robot body and its control system, etc., to achieve improved adaptability, simple and compact structure, and strong bearing capacity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing.
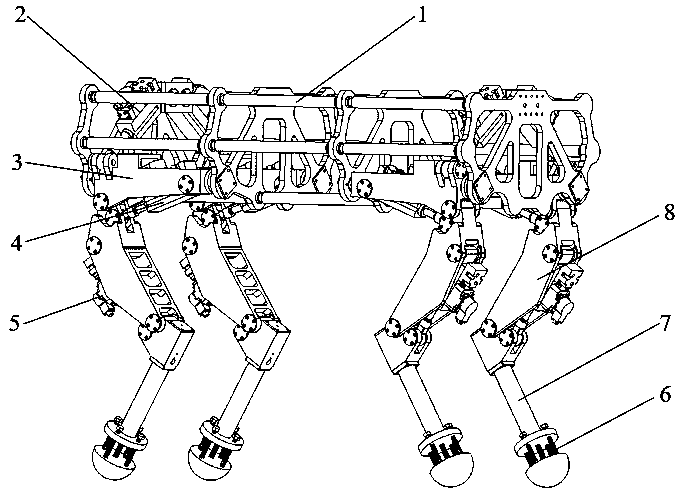
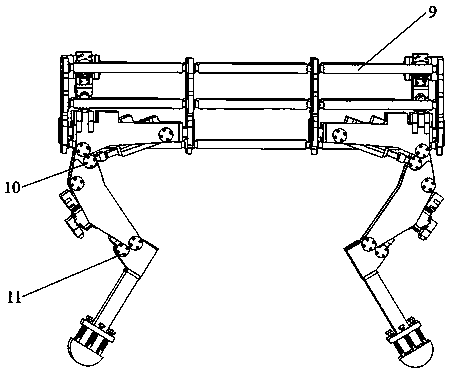
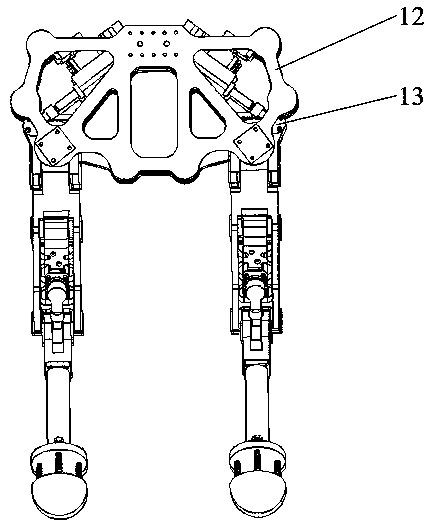
[0022] A foot adaptive hydraulic quadruped robot, such as figure 1 As shown, it includes: fuselage 1 and four mechanical legs with the same structure, each leg is composed of yaw hydraulic cylinder 2, yaw connecting rod 3, thigh 8, thigh hydraulic cylinder 4, calf 7, calf hydraulic cylinder 5 and foot end 6 components, each hydraulic cylinder is controlled by a servo valve 14.
[0023] The power source of the robot is the hydraulic pump pumping the hydraulic oil out of the oil tank. The hydraulic oil is decompressed by the pressure reducing valve and flows through the oil inlet of the servo valve, and then flows into the hydraulic cylinder. The hydraulic oil overflows back to the oil tank through the overflow valve. .
[0024] There is a boss on the upper plane of the sole 17, which is used to fix the damping spring 16, and there are bolts 15 on the damping spring 16 to a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com