

Optimal torque distribution method based on distributed electric drive vehicle
A technology of optimal torque and distribution method, applied in electric vehicles, control drives, vehicle components, etc., can solve problems such as prolonging simulation time, increasing calculation burden, and requiring high objective function gradient and Hessian matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment takes the driving demand torque of distributed electric drive vehicles as the distribution object, implements it on the premise of the technical solution of the present invention, and provides detailed implementation methods. The scope of protection of the present invention includes but not limited to distributed electric drive vehicles .
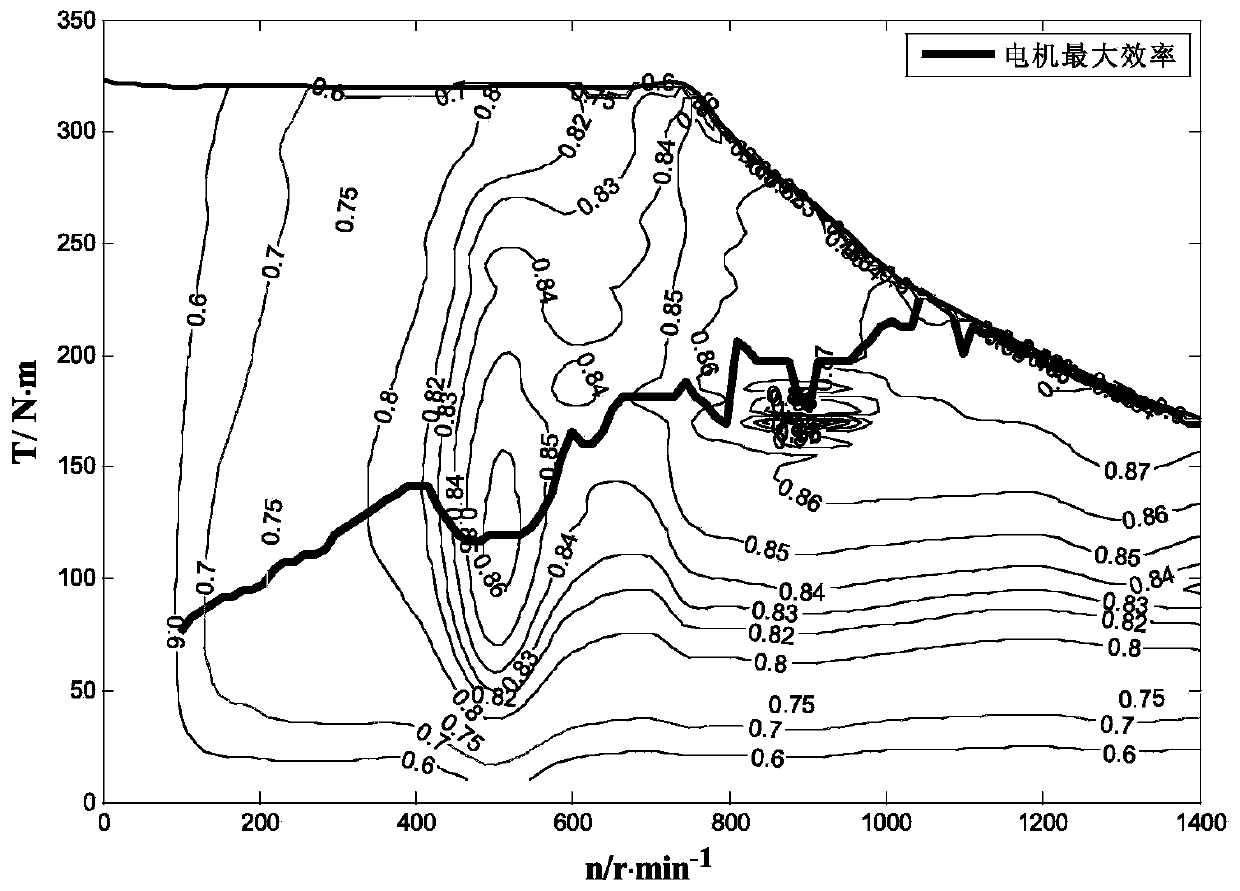
[0027] as attached figure 1 As shown, the efficiency of the drive motor is related to the required torque and the wheel speed. The red line in the figure is the maximum motor efficiency corresponding to a certain speed and the required torque. In order to improve the efficiency of the vehicle drive system, the drive motor should work as high as possible During the efficiency period, that is near the red curve.
[0028] Considering that the distributed electric drive vehicle is a highly comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More