

Steering control method and system of narrow space four-wheel independent steering rescue chassis
A technology of steering control and steering angle, applied to steering mechanism, vehicle parts, transportation and packaging, etc., can solve problems such as increased turning time and difficulty, personal and property losses, and failure to consider the surrounding steering space, so as to reduce personal injury and property loss, improve rescue speed and efficiency, and improve adaptability and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
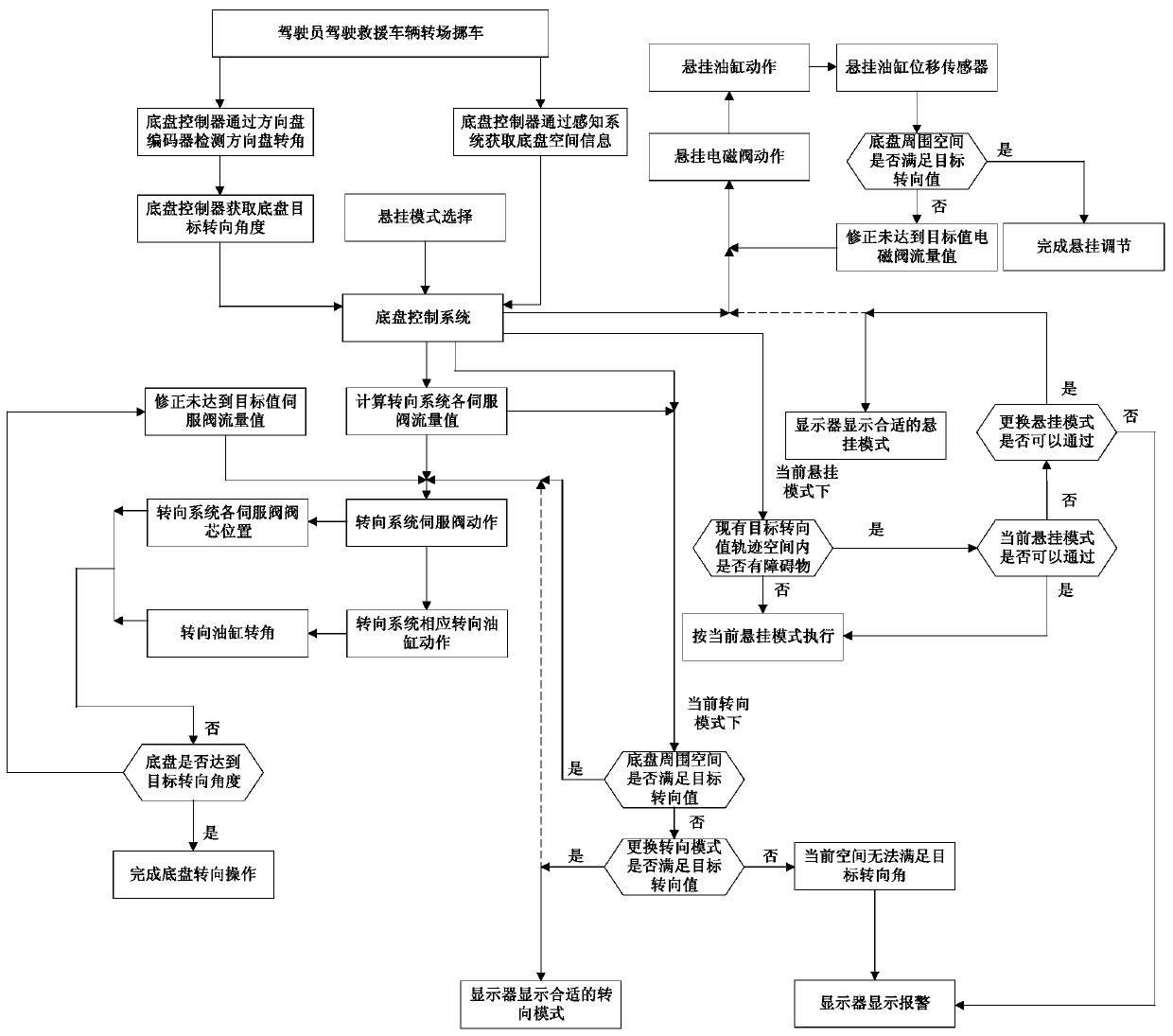
[0044] Such as figure 1 As shown, a steering control method quickly determines the spatial information around the vehicle through the perception of the surrounding space of the rescue vehicle, including information such as the surrounding turning space that can be turned and the outline size and location of ground obstacles. When the driver manipulates the steering wheel to turn, the chassis controller obtains the steering wheel angle according to the steering wheel encoder, calculates the driver's target steering angle, controls the steering cylinder through the steering servo valve to complete the action, and obtains the actual steering angle through the angle sensor on the steering cylinder , fed back to the chassis controller. After comparing the actual steering angle value with the target value steering angle value, the difference correction is completed. At the same time, the chassis controller monitors the surrounding space information in real time, displays the best s...
Embodiment 2
[0063] Such as figure 1 Shown, a kind of steering control system is characterized in that, comprises:
[0064] The chassis space perception module is used to sense the space information around the vehicle and upload it to the controller;
[0065] The target steering angle acquisition module is used to acquire the target steering angle and upload it to the controller;
[0066] Central control module: used to judge whether the space around the vehicle satisfies the target steering angle in the current steering mode based on the space information around the vehicle and the target steering angle;
[0067] If it is satisfied, plan the steering path under the current steering mode; give instructions to control the steering cylinder to continue the steering action according to the current steering mode and the planned steering path; and obtain the actual steering angle of the steering cylinder until the actual steering angle and the target The steering angle difference is within th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More