

Tracked unmanned vehicle trace tracking controller design method based on kinematic model
A kinematic model and trajectory tracking technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of lack of consideration of vehicle driving stability and tracking speed, no consideration of slipping effects, accuracy to be further verified, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be described in detail below with reference to the accompanying drawings and examples.
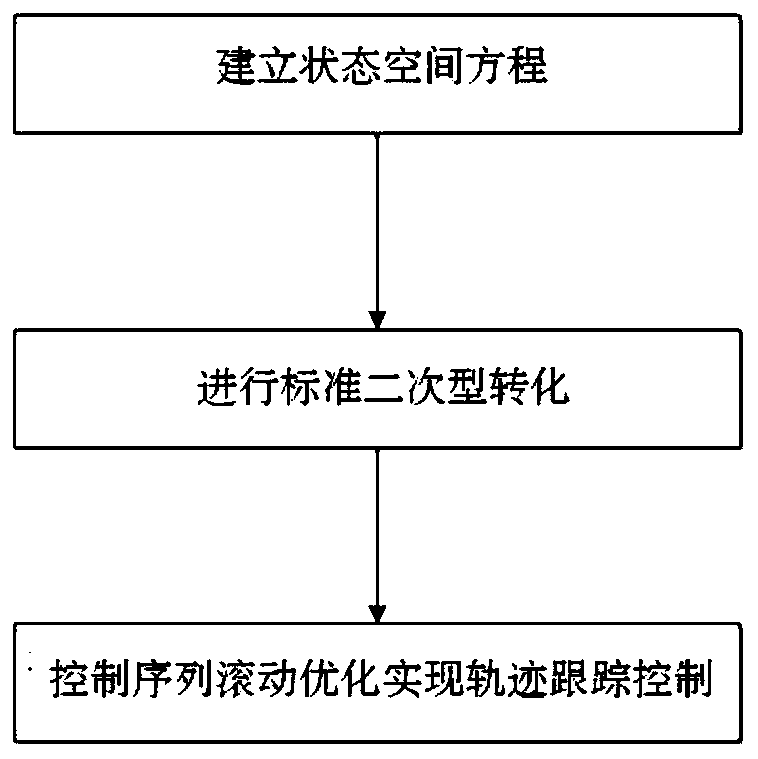
[0072] as attached figure 1 As shown, the present invention provides a method for designing a trajectory tracking controller for a tracked unmanned vehicle based on a kinematic model, and the implementation steps of the method are as follows:
[0073]The first step: establish the state space equation according to the kinematics model of the tracked vehicle considering slip;
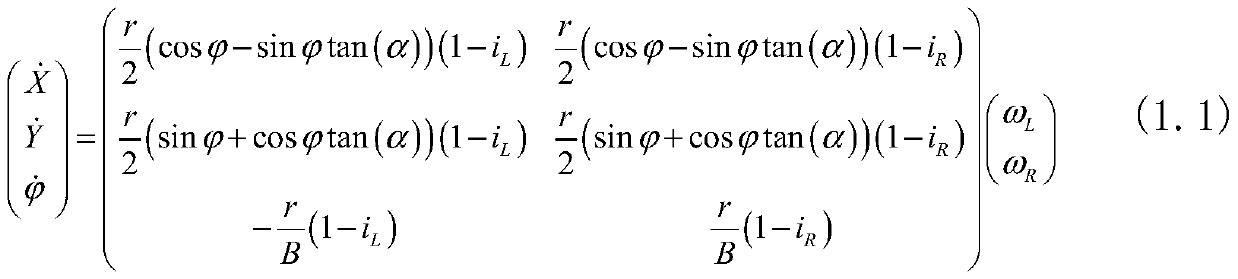
[0074] The kinematics model of tracked vehicle considering slip is shown in formula (1.1).
[0075]
[0076] in,
[0077]
[0078] Express it as a nonlinear model as follows:
[0079]
[0080] in,
[0081] Put equation (1.3) at the working point (ξ r ,μ r ) for a first-order approximate Taylor expansion linear system, we get
[0082]
[0083] The working point (ξ r ,μ r ) into the model (1.3), the equation (1.4) subtracts the equation (1.3), and the linearizatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More