

Multi-arm type harvesting robot and picking method thereof
A robot and arm-type technology, applied in the direction of picking machines, harvesters, manipulators, etc., can solve the problems of low work efficiency and achieve the effect of improving work efficiency and shortening the picking time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
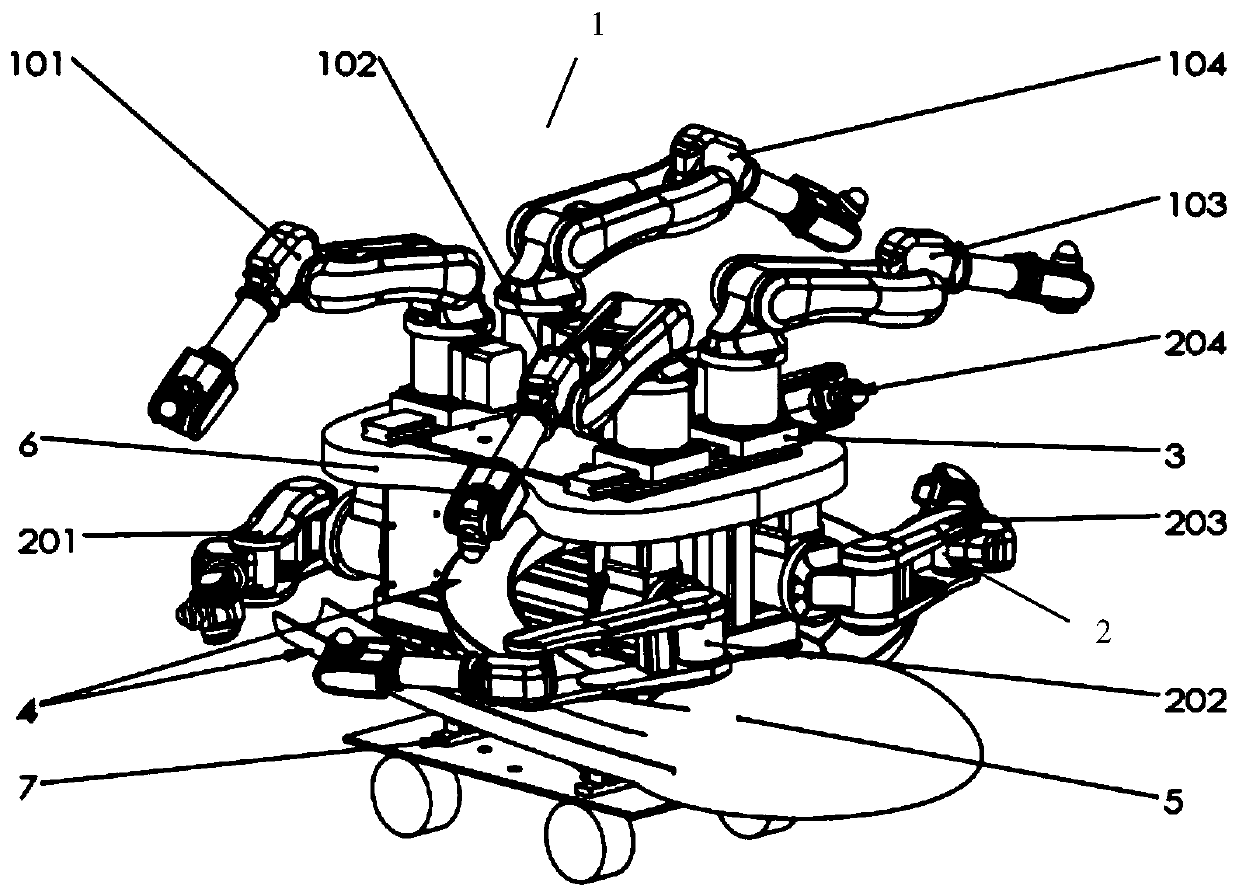
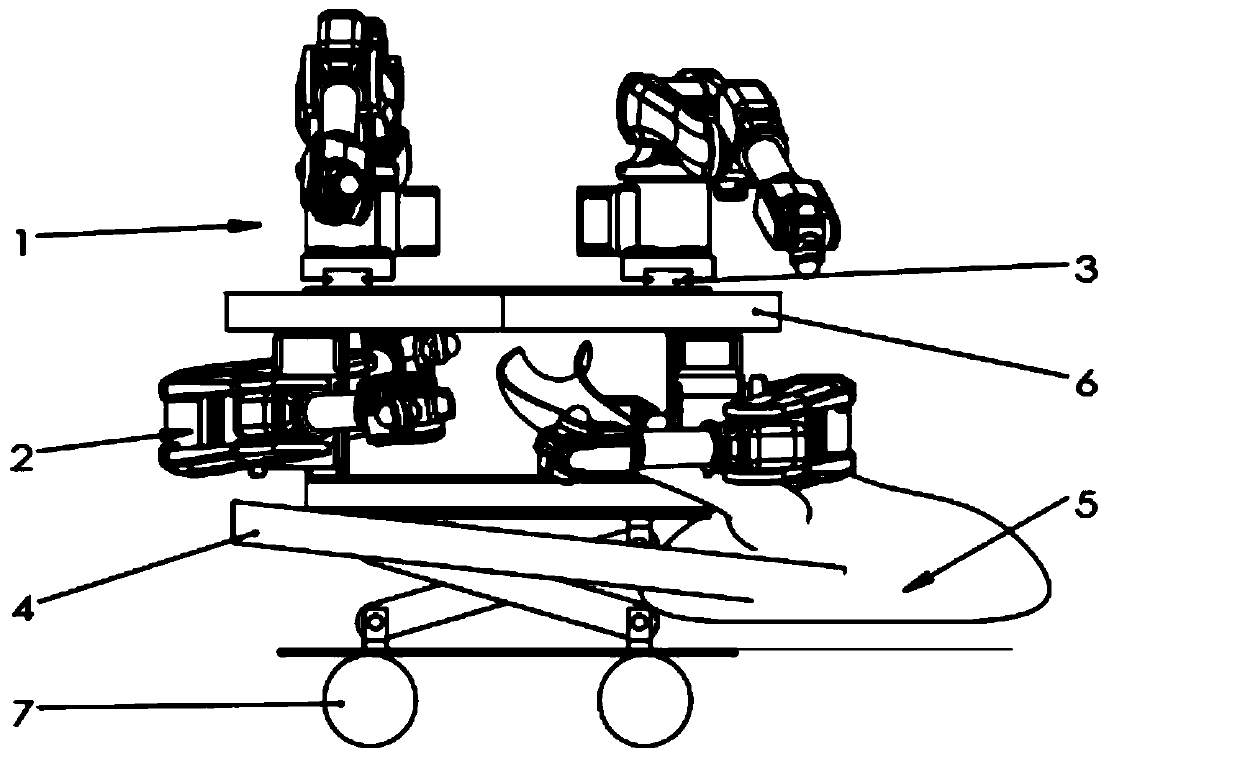
[0025] Such as Figure 1 to Figure 2 As shown, a multi-arm type harvesting robot includes a picking robot arm system and a chassis system 7, and the picking robot arm system includes a picking robot arm group, a working platform 6, and a fruit storage device, and the picking robot arm group includes An upper-layer picking robot arm group 1 and a lower-layer picking robot arm group 2 each provided with four robotic arms, a guide rail slider mechanism 3 is installed on the working platform 6, and an upper-layer picking robot arm group 1 is carried. The fruit storage device is installed at the lower end of the picking robot arm group, and includes a connected fruit storage device 5 and a fruit collection device 4 . The upper layer picking robot arm group 1 adopts the method of vertical installation; the lower layer picking robot arm group 1 is installed on the side of the working platform 6 and adopts the method of horizontal installation.
[0026] Specifically, there is a certa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More