Multi-degree-of-freedom motion platform based on double primary linear motors
A linear motor and motion platform technology, applied in the direction of electric components, electrical components, electromechanical devices, etc., can solve the problems of low positioning accuracy, slow dynamic response, complex structure, etc., and achieve high positioning accuracy, fast dynamic response, and simple system structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
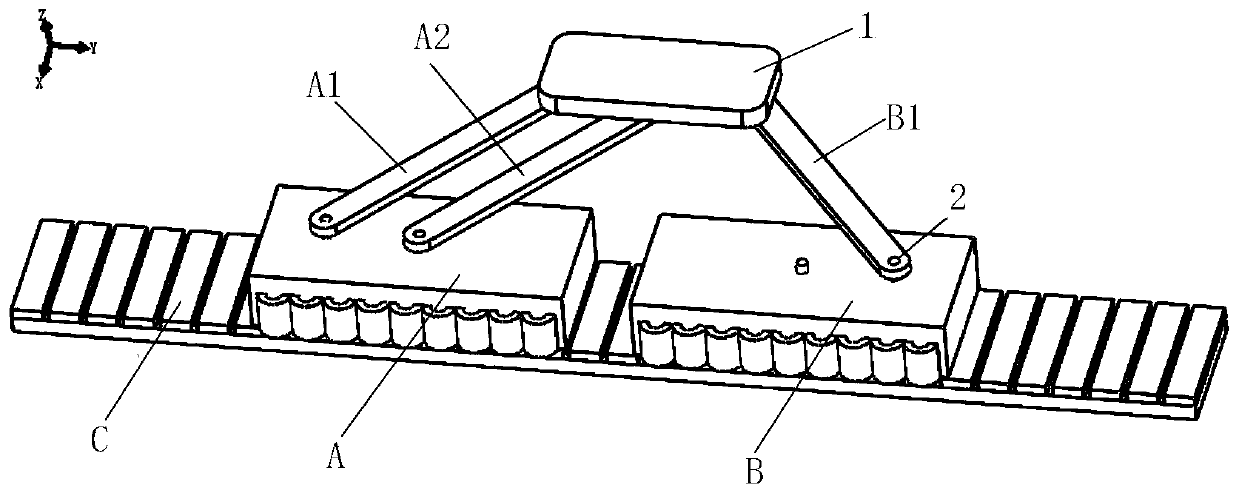
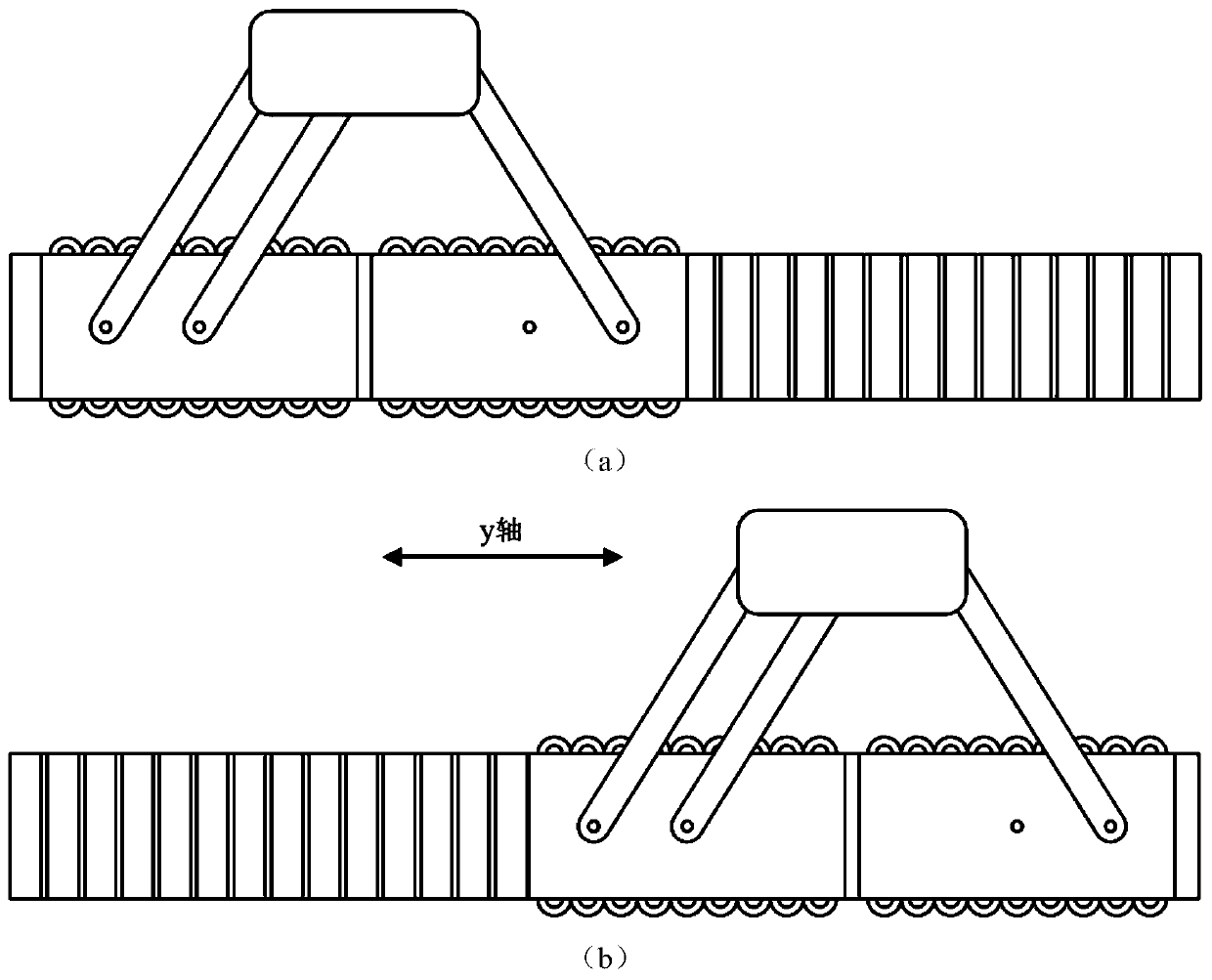
[0037] refer to Figure 1 to Figure 4 The multi-degree-of-freedom motion platform with double-primary unilateral linear motors performs two-degree-of-freedom positioning motion structure and reference in the horizontal plane xoy Figure 5 to Figure 6 The multi-degree-of-freedom motion platform with double-primary bilateral linear motors performs two-degree-of-freedom positioning motion structure in the horizontal plane xoy to specifically illustrate this embodiment 1. The connecting rod in the motion platform can move around the kinematic pair (2) in the horizontal plane Free rotation, the relative position between the two moving primary stages remains unchanged, and when moving in one direction at the same speed, the positioning table 1 can perform positioning movement in the y direction.
[0038] refer to Figure 1 to Figure 6 , the multi-degree-of-freedom motion platform with double-primary linear motors in the present embodiment 1 includes a linear motor with double-actin...
Embodiment 2
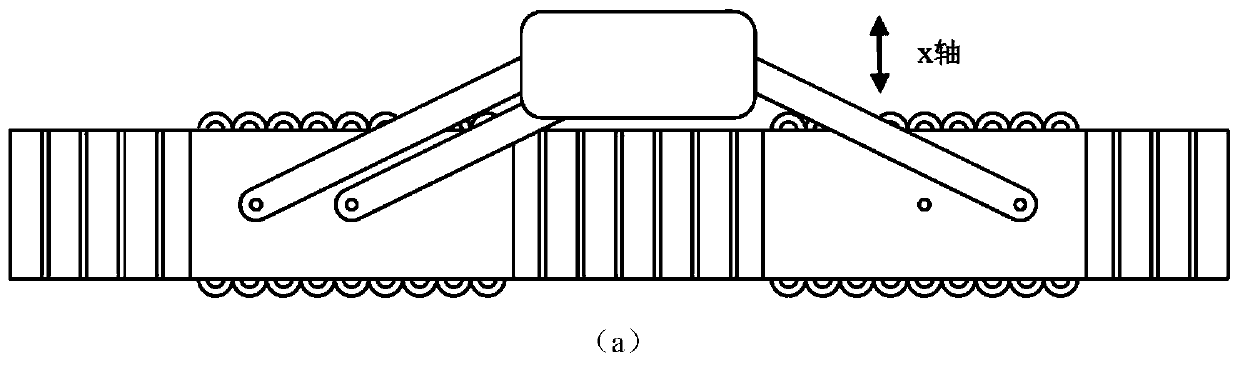
[0048] refer to Figure 7 to Figure 10 The multi-degree-of-freedom motion platform with double-primary unilateral linear motors performs positioning motion in the yoz plane structure and reference Figure 11 to Figure 12 The multi-degree-of-freedom motion platform with double-primary bilateral linear motors performs positioning motion in the yoz plane to specifically illustrate this embodiment 2. The connecting rod in the motion platform can freely rotate around the kinematic pair 2 in the vertical plane, and the two The relative position between each moving primary remains unchanged, and when moving in one direction at the same speed, the positioning table 1 can perform positioning movement in the z direction.
[0049] refer to Figure 7 to Figure 10 , the multi-degree-of-freedom motion platform with double-primary linear motors in this embodiment 2 includes a linear motor with double-acting primary, a positioning platform 1, 3 connecting rods and a plurality of kinematic pa...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap