

Positioning and navigation device based on robot walking
A technology for positioning, navigation, and robotics, applied in the field of robotics, can solve the problems of moving direction and angle restrictions, route selection, poor stability, etc., to achieve the effect of improving pressure bearing, ensuring stability, and avoiding damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
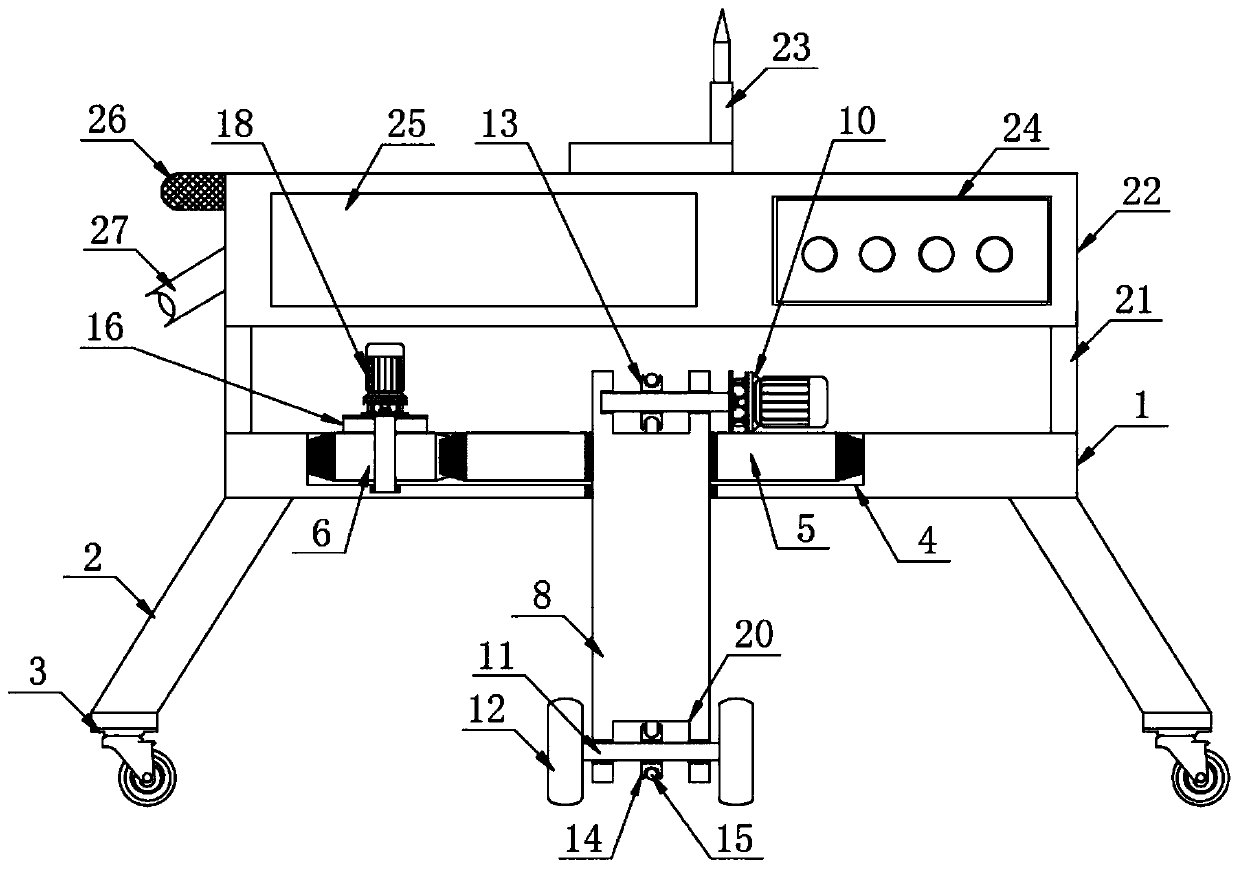
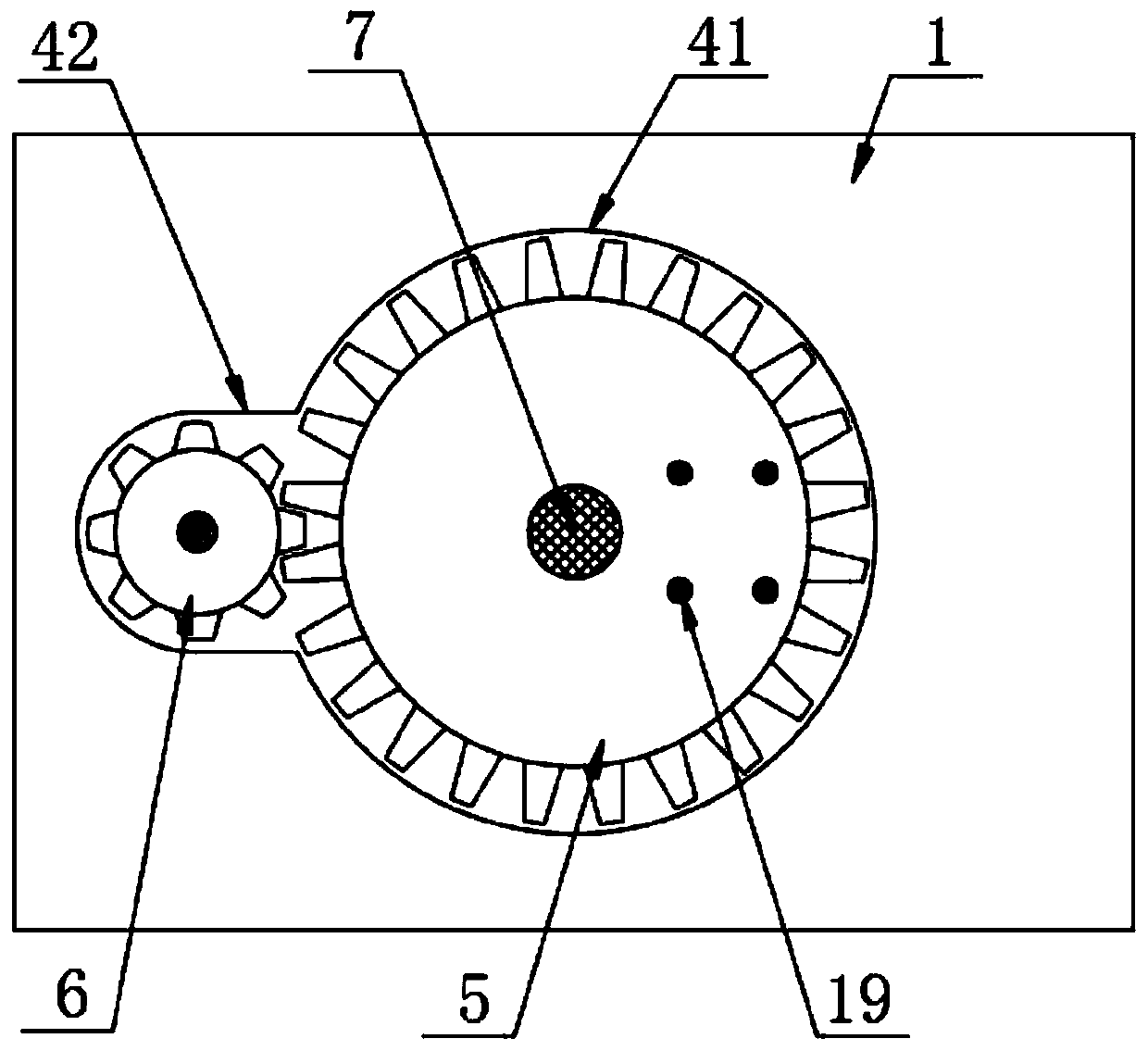
[0028] The present invention provides such Figure 1-8The shown positioning and navigation device based on robot walking includes a base plate 1, side plates 2 are fixed at both ends of the bottom of the base plate 1, universal wheels 3 are fixed at the bottom of the side plate 2, and the base plate 1 The top is provided with a fitting groove 4, and the fitting groove 4 includes a first fitting groove 41 and a second fitting groove 42, and the inside of the first fitting groove 41 and the second fitting groove 42 are respectively provided with a second fitting groove. A gear 5 and a second gear 6, the axial center positions of the first gear 5 and the second gear 6 are provided with a first through hole 7, and the first through hole 7 on the first gear 5 is internally fixed A collar 8 is provided, the two ends of the collar 8 are provided with second through holes 9, the top of the first gear 5 is provided with a driving motor 10, and the output shaft of the driving motor 10 i...
Embodiment 2
[0039] Different from Embodiment 1, the inner side wall of the collar 8 is fixedly provided with two sets of limit rods 28, each group is provided with two, and each set of two limit rods 28 is related to the position of the notch 20 at the corresponding position. Vertically to the central axis, it is axisymmetrically arranged, and the distance between the two limit rods 28 arranged in parallel is equal to the diameter of the transmission belt 15, which is beneficial to limit the transmission belt 25 in the transmission process through two sets of limit rods 28, To prevent the transmission belt 15 from breaking away from the driving wheel 13 or the driven wheel 14 during high-speed rotation, thereby ensuring the stability of the transmission process, the outer top of the groove 29 and the through groove 30 is annularly evenly distributed with a plurality of arc-shaped grooves 31, The inside of the arc groove 31 is provided with a ball 32, the diameter of the ball 32 is greater ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More