

Underwater double-arm cooperating grabbing, holding and collision preventing integrated method and system
A dual-arm, collision-avoidance technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problem of high dependence on sensor accuracy and stability, difficulties in installation and imaging of visual sensing equipment, and unsuitable detection of collision avoidance in underwater operations etc. to achieve the effects of reducing the computational burden, ensuring safety, and widening the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
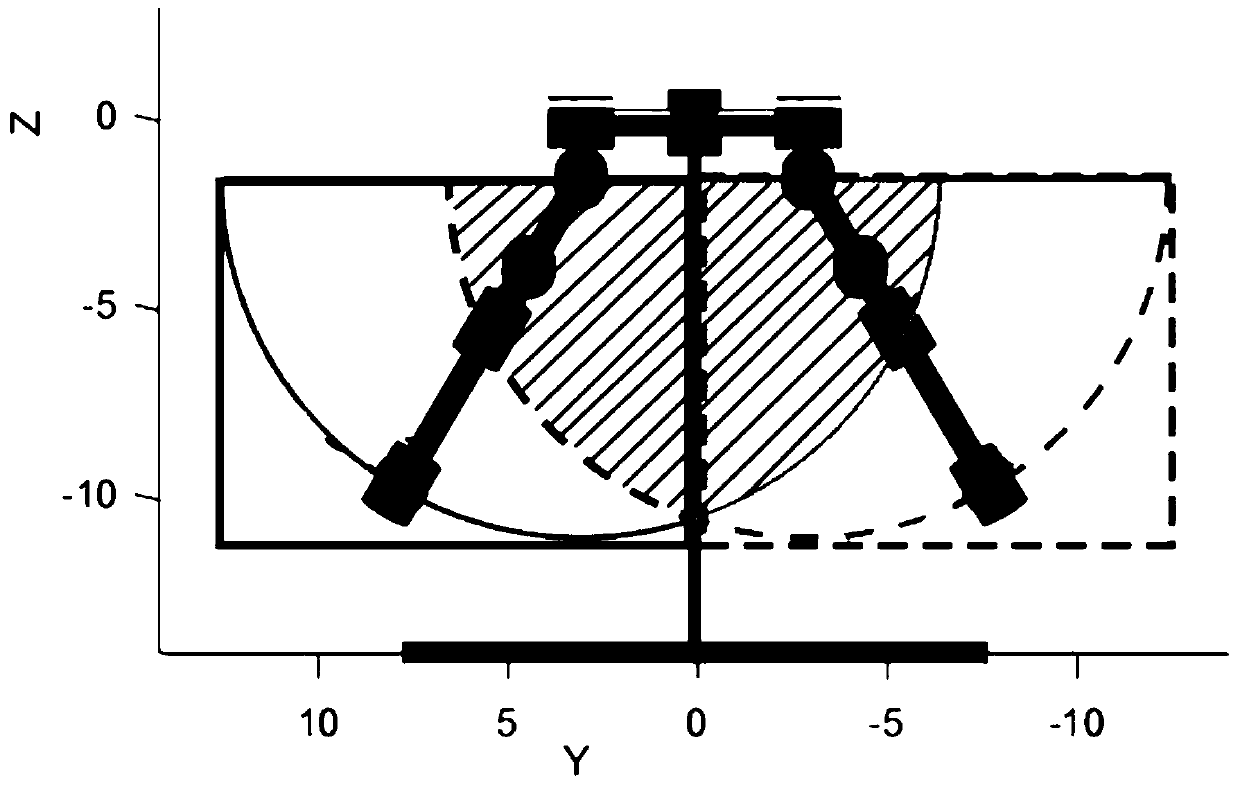
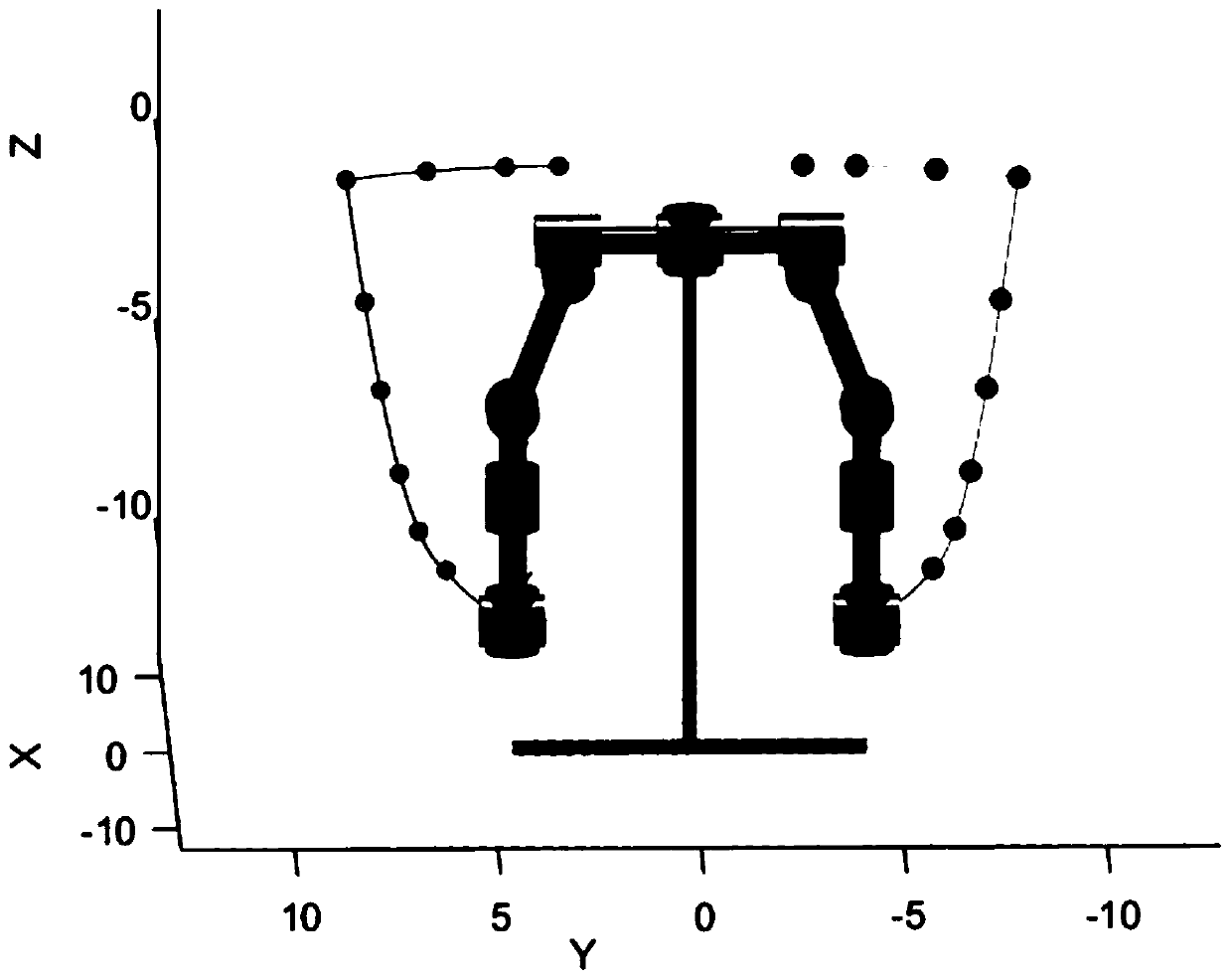
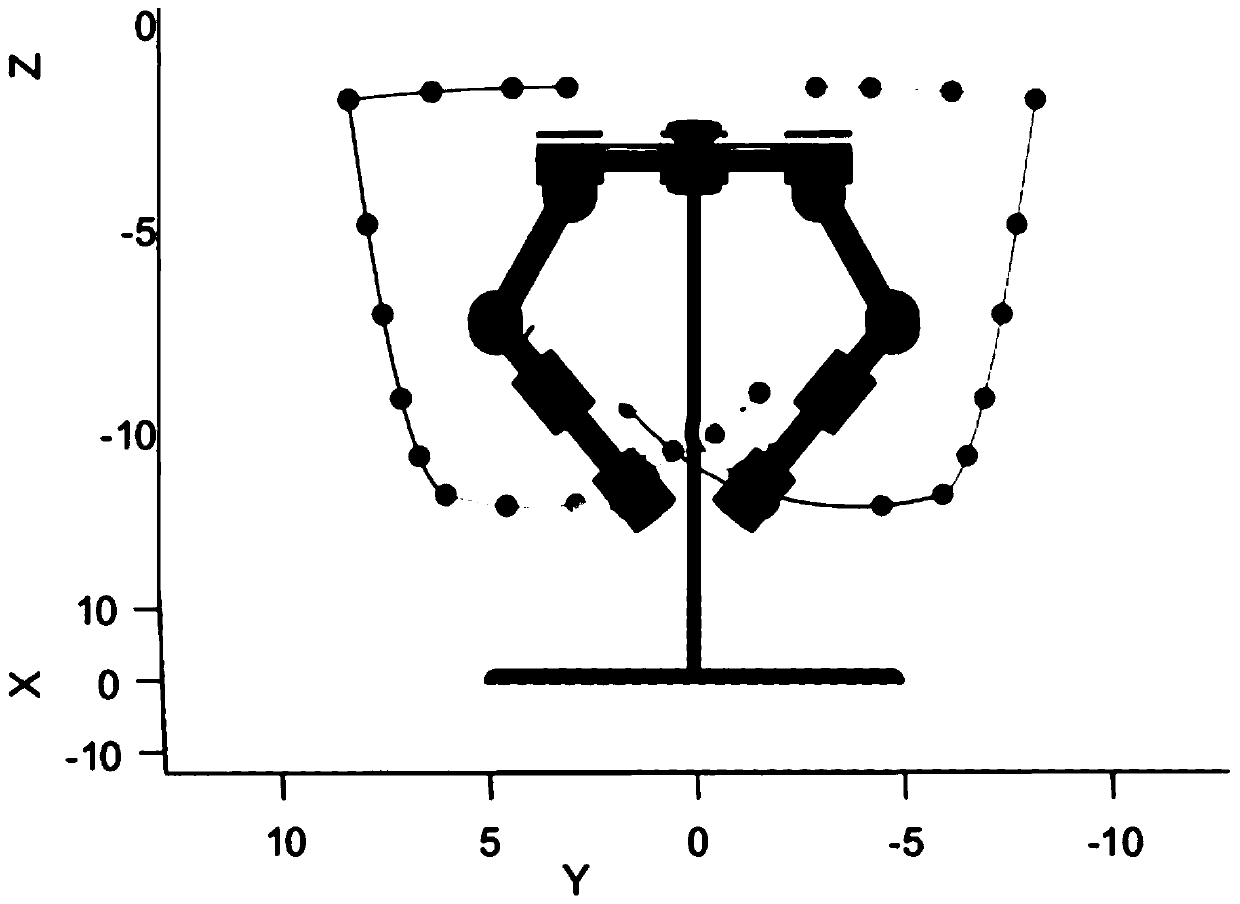
[0057] The dual robotic arms of this embodiment take AUV (Autonomous Underwater Vehicle, autonomous underwater vehicle, also known as untethered underwater robot) as the carrier, and according to the structure of the dual robotic arms, on the basis of the dual arm working space, the space It is divided into single-arm movement feasible area, single-arm movement warning area and double-arm cooper...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More