

Kernel correlation filtering target tracking method suitable for pedestrian following of mobile robot
A mobile robot and kernel correlation filtering technology, applied in the field of visual target tracking, can solve the problems of lack of anti-occlusion performance, inability to adapt to scale transformation, etc., achieve good robustness and real-time performance, improve accuracy and stability, and perform well Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
[0027] The present invention has designed a kind of nuclear correlation filter target tracking method that is applicable to mobile robot pedestrian following, and this method specifically comprises the following steps:
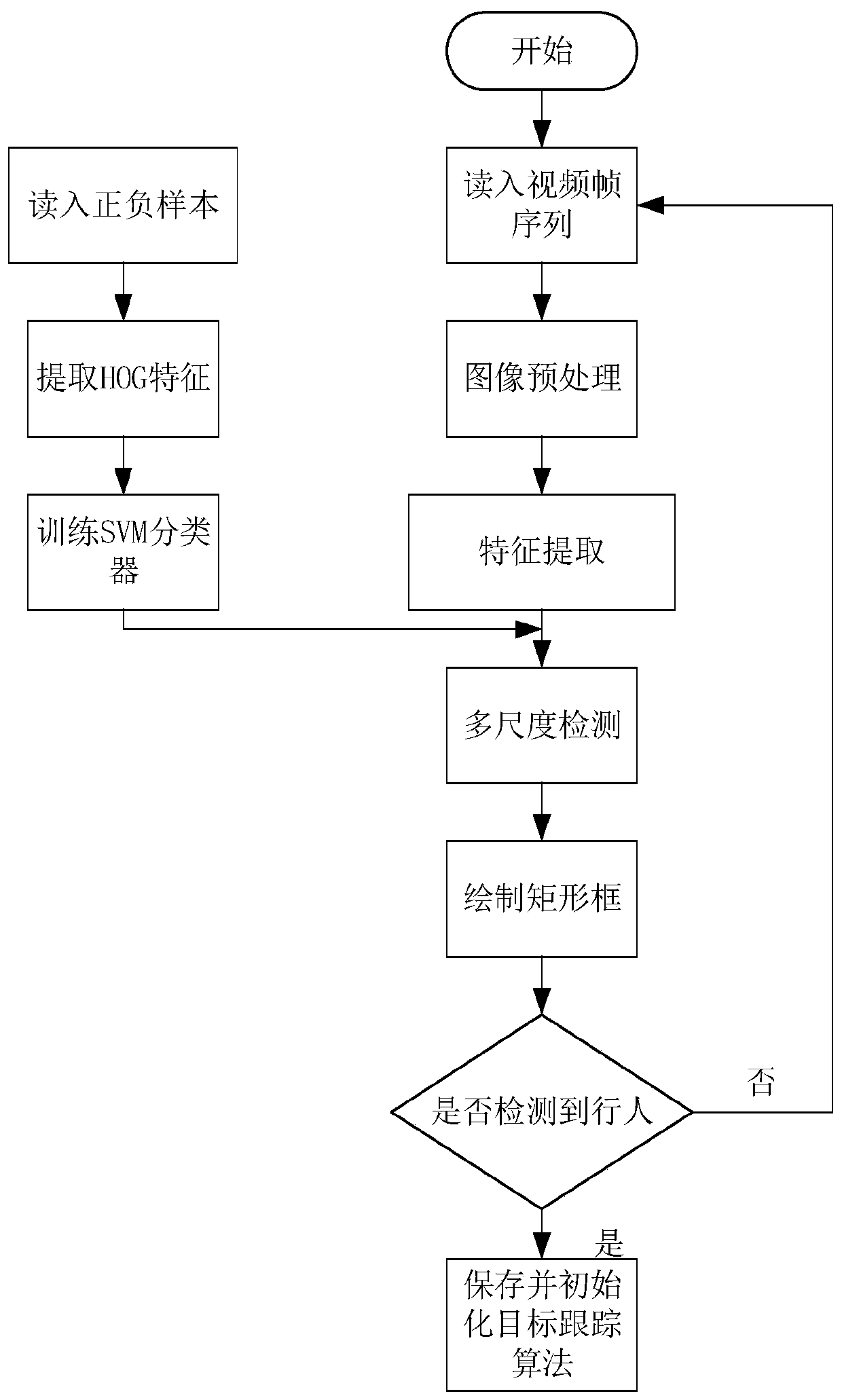
[0028] Step 1. Using the SVM pedestrian classifier, the SVM pedestrian classifier that has been trained by OpenCV can be used to calculate and count the HOG feature of the image local area gradient direction histogram of the input video picture frame as the input of the SVM pedestrian classifier, using the sliding window method Detect pedestrian target Obtain and store the pedestrian target area of the current frame, and use the pedestrian target area of the current frame as the initial target position and target area for the mobile robot pedestrian to follow, such as figure 1 As shown, the steps are as follows:
[0029] Step 11. Turn on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More