

centralized two-stage Kalman estimation method with related measurement noise
A technology for related measurement and measurement of noise, applied in the field of filters, can solve problems such as noise, and achieve the effect of reducing computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
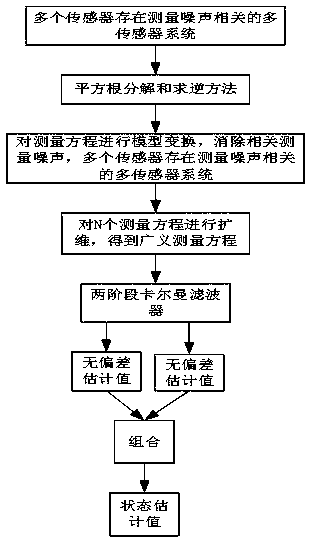
[0015] Concrete implementation steps of the present invention can be found in figure 1 , including the following steps:
[0016] Step 1. System Modeling
[0017] A common multi-sensor system with bias is considered as a model. The statistical characteristics of the system state noise are known. The state equation, bias equation and measurement equation of the system with related measurement noise are described as follows:
[0018]
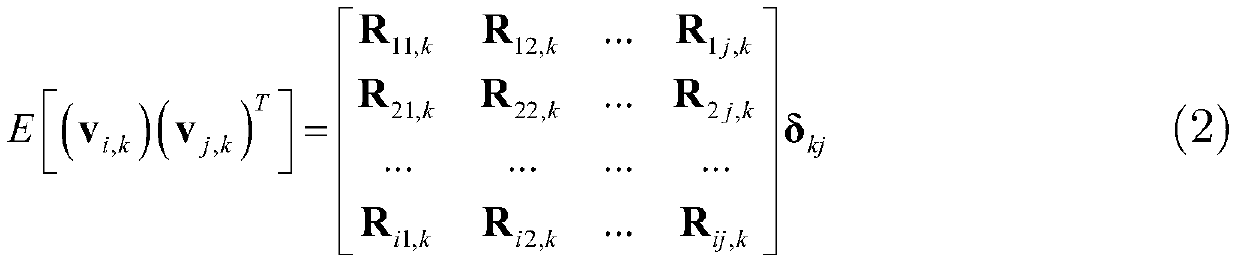
[0019] In the formula, k represents the time series; x k ,b k and y i,k are respectively the n-dimensional state of the system, the m-dimensional deviation and the p-dimensional observation of the i-th sensor; and v i,k are the system state noise, system deviation noise and measurement noise of the i-th sensor, respectively; A k+1,k ∈R n×n is the state transition matrix; C i,k ∈ R p×n is the state matrix of the i-th sensor. State noise, bias noise, and measurement noise are all zero-mean white Gaussian noise sequences: And the corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More