

Audio and video data acquisition system based on NAO robot
A technology of data acquisition system and robot, which is applied to the components of TV system, TV, color TV, etc., and can solve the problems that audio and video collection systems cannot be transferred and used with each other
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
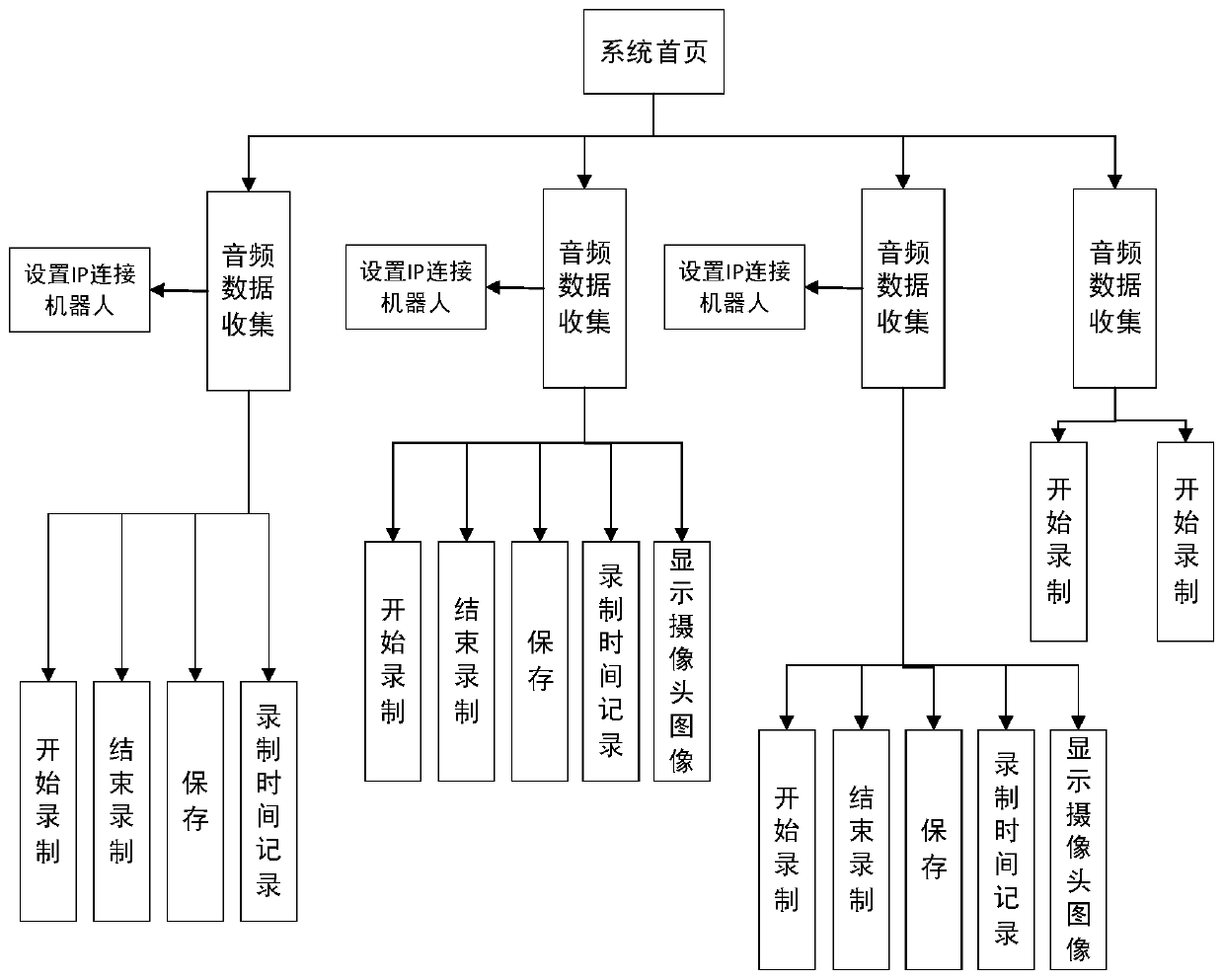
[0023] A graphic interface audio and video data collection system based on NAO robot, see figure 1 , the system consists of the following parts:
[0024] Audio collection module: control the robot to collect audio data, select the sound channel, and transmit the collected data to the PC side of the running system for optional path storage.
[0025] Video collection module: control the robot to collect video data, display the camera image in real time and transmit the collected data to the PC side of the running system for optional path storage.
[0026] Audio and video collection module: control the robot to collect audio and video data at the same time, select the sound channel, display the image of the camera in real time, and transmit the collected data to the PC side of the running system for optional storage.
[0027] Audio playback module: select the recorded and saved audio files to play for users to view.
[0028] Video playback module: select the recorded and saved...
Embodiment 2
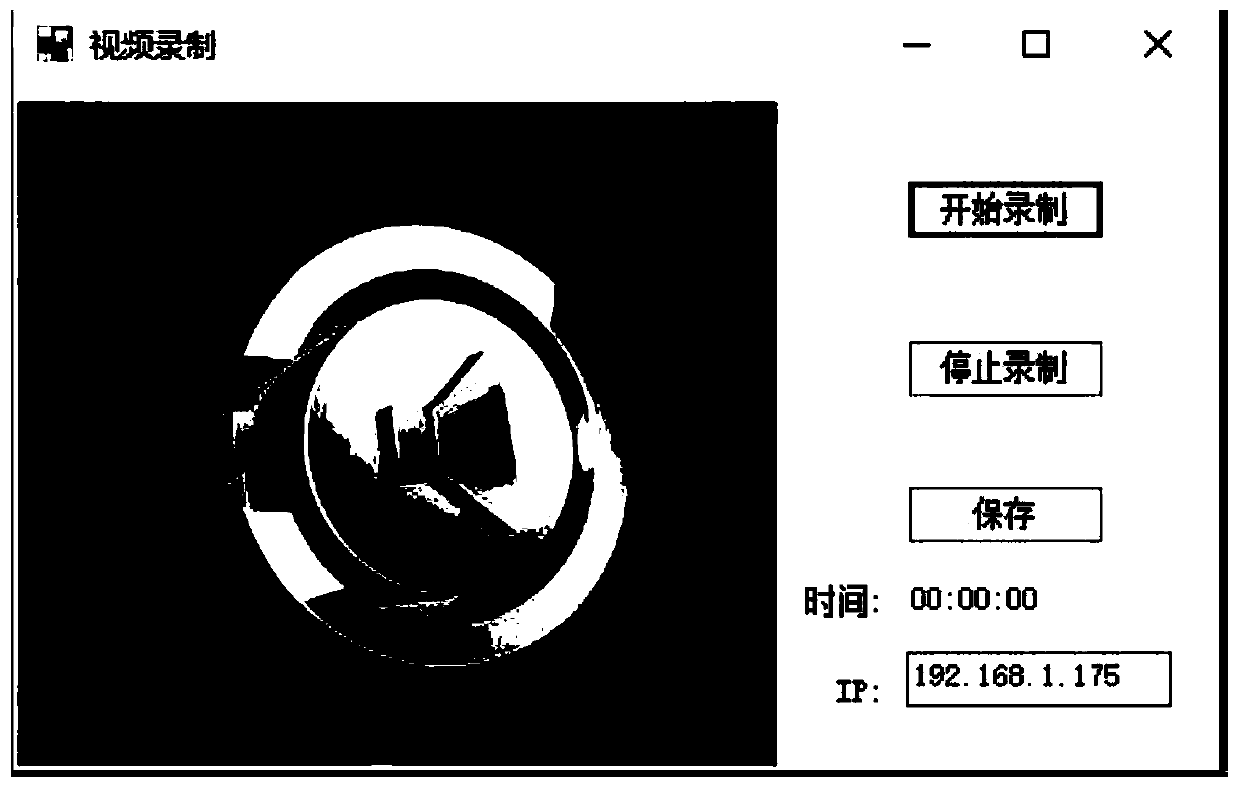
[0041] Combined with the specific operation steps below, Figure 2-Figure 4 The scheme in Example 1 is further introduced, see the following description for details:
[0042] Step S0101: collect audio data, select a channel, and transmit the collected data to the PC running the system for saving in an optional path, and the recorded time can be displayed during the collection process.
[0043] The robot connection principle is to use the ALAudioRecorderProxy interface in the NAOqi API (known to those skilled in the art, the embodiment of the present invention will not repeat this), create this class, and the parameters are the robot IP address and port;
[0044] The principle of controlling the robot to record audio data is to call the ALAudioRecorderProxy interface in NAOqiAPI;
[0045] The FtpWebRequest and FtpWebResponse interfaces of FTP transmission are used to store the data to the PC (known to those skilled in the art, and the embodiment of the present invention will n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More