

Control system of biped travelling robot
A walking robot and control system technology, applied in the field of robotics, can solve the problems of high cost, complex structure, difficult large-scale and large-scale market promotion, etc., and achieve the effect of precise walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to further understand the present invention, the preferred embodiments of the present invention are described below in conjunction with examples, but it should be understood that these descriptions are only to further illustrate the features and advantages of the present invention, rather than limiting the claims of the present invention.
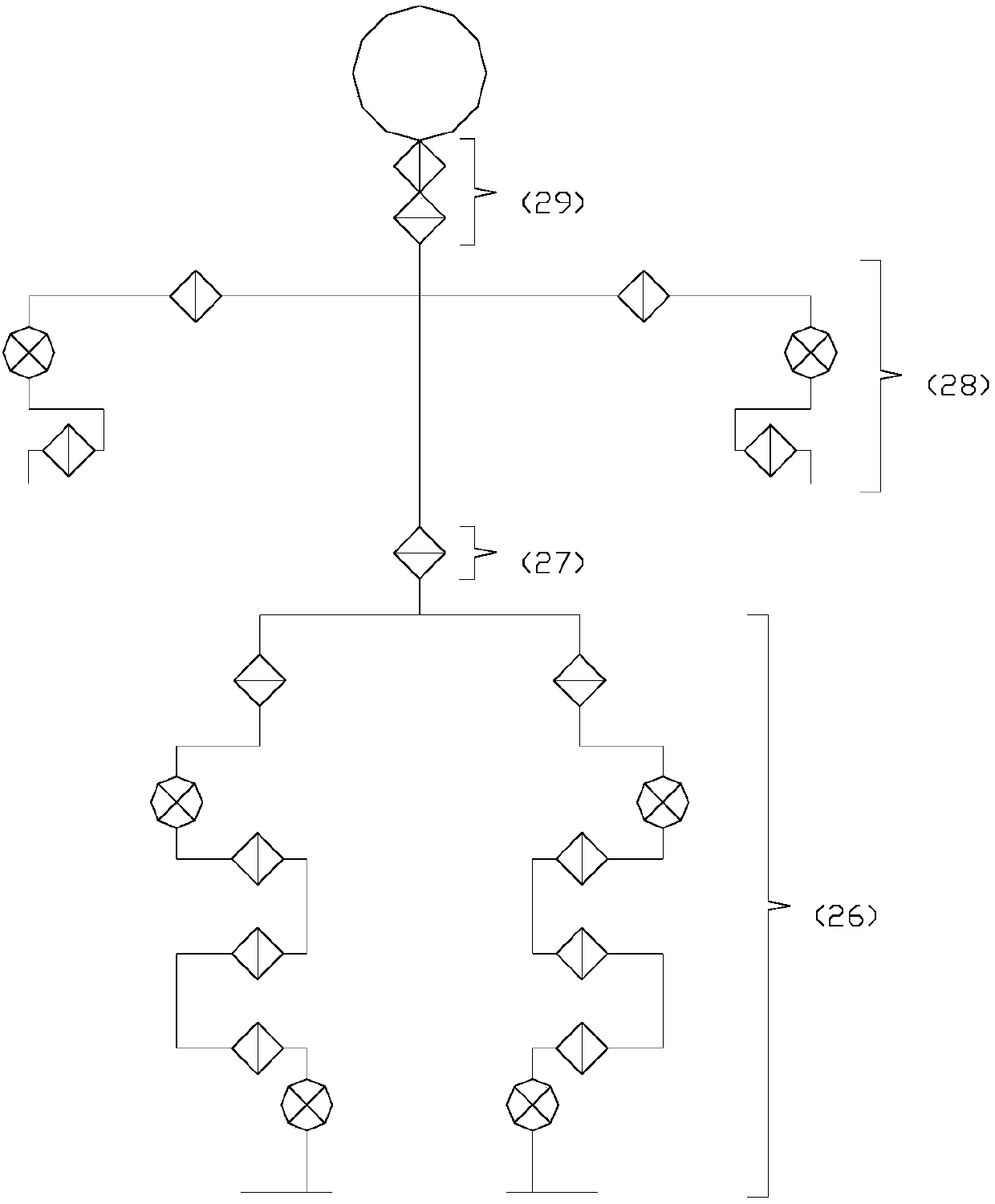
[0030] as attached figure 1 As shown, the present invention provides a biped walking robot, whose body structure is made of aluminum-titanium alloy, which not only reduces weight, but also has higher strength and rigidity. The biped walking robot has a total of 21 degrees of freedom, wherein: the two legs of the lower limbs have a total of 12 degrees of freedom, and each leg has six degrees of freedom, including two ankle joints for forward swing and side swing. Degree of freedom, one degree of freedom for the knee joint for forward swing, and three degrees of freedom for the hip joint for forward swing, side swing and rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More