

A real-time pose tracking method based on a target three-dimensional model
A 3D model and target technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as low computing efficiency, low pose tracking accuracy, and limited popularization and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Embodiments of the present invention will be further described in detail below.
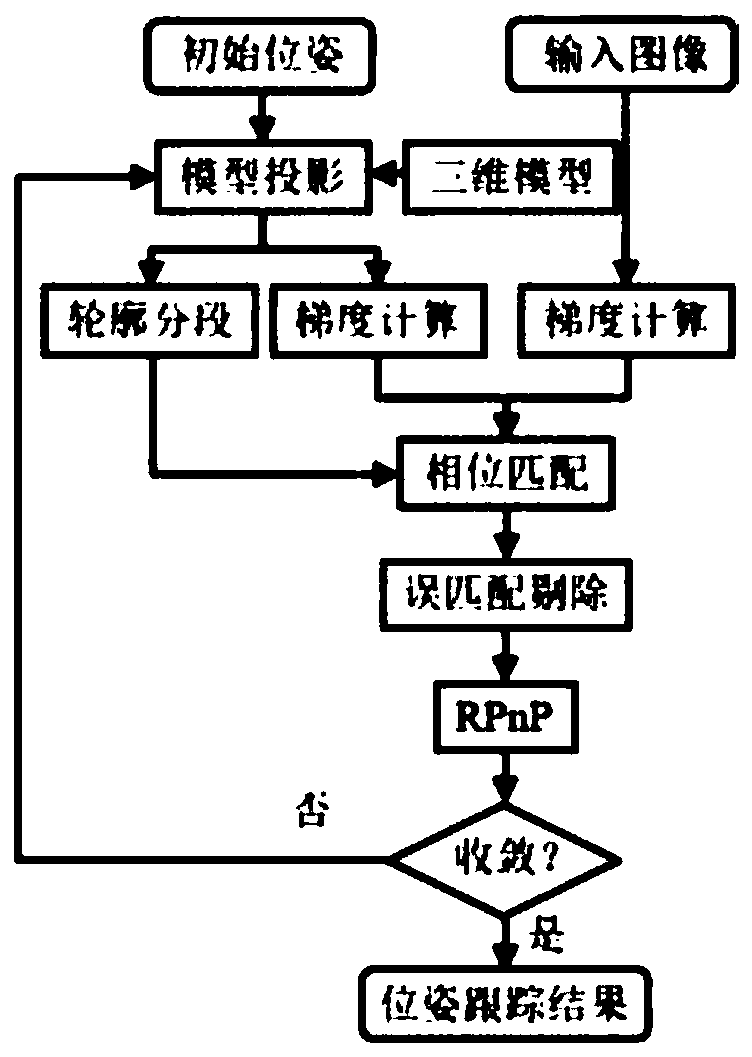
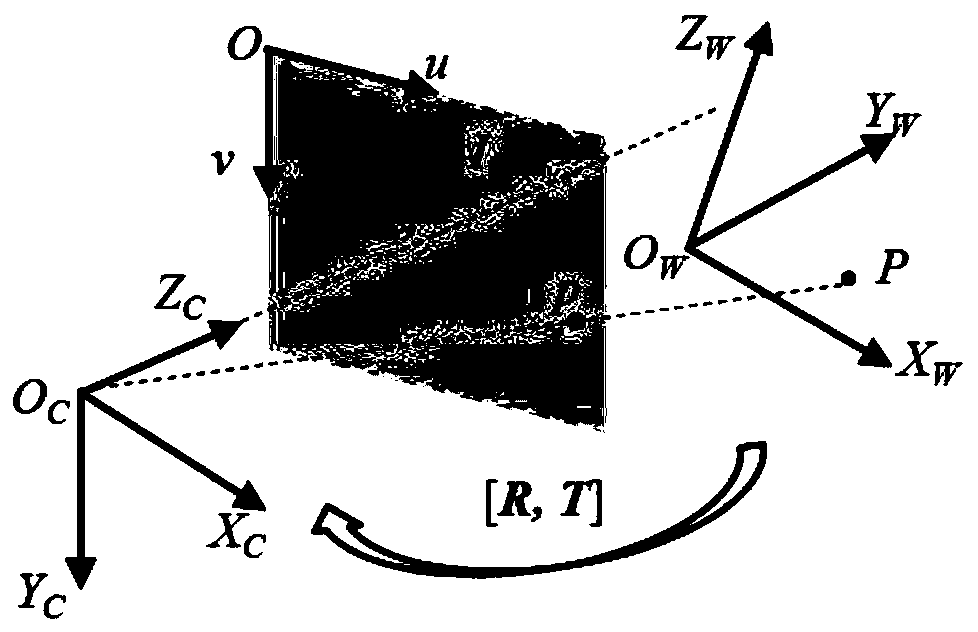
[0056] (1) Contour part model generation
[0057] Using the 3D model of the target, combined with the initial estimation of the target pose, for the vertices in the model, according to figure 2 The imaging model shown is projected onto the image using formula (1), where R and T are the rotation matrix and translation vector describing the motion of the rigid body, respectively, where [X W Y W Z W ] T , [X C Y C Z C ] T and [u v] T are the coordinates of vertices in the world coordinate system, camera coordinate system and image coordinate system respectively, F x , F y 、C x and C y are the camera focal length and principal point parameters, which are obtained through calibration in advance. According to the vertex projection results, calculate the projection area corresponding to the patch, and finally determine the area corresponding to the entire target in the projectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More