

An unmanned ship with three-stage shock absorption and self-stabilization system
A three-stage shock absorption, unmanned ship technology, applied in the direction of hull, ship construction, hull parts, etc., can solve the problems of large impact on the surface operation environment, no shock absorption and anti-rolling system, and low stability of unmanned ships. Achieve the effect of increasing sailing stability, reducing health hazards and increasing shock absorption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
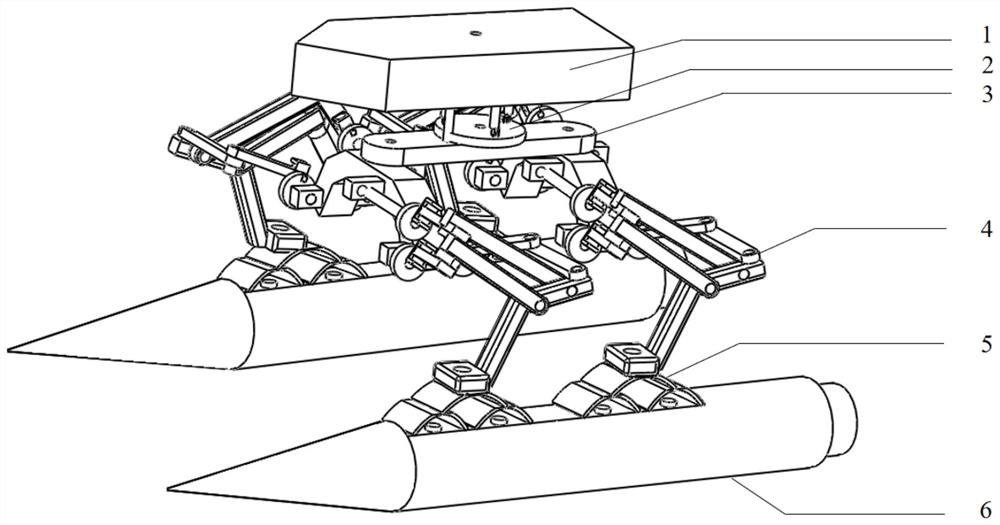
[0033] Such as figure 1 Shown is a three-dimensional view of the shock-absorbing unmanned ship, which is composed of a shock-absorbing base 5, a cat-like link-type leg shock-absorbing structure 4, and a self-stabilizing cabin structure.
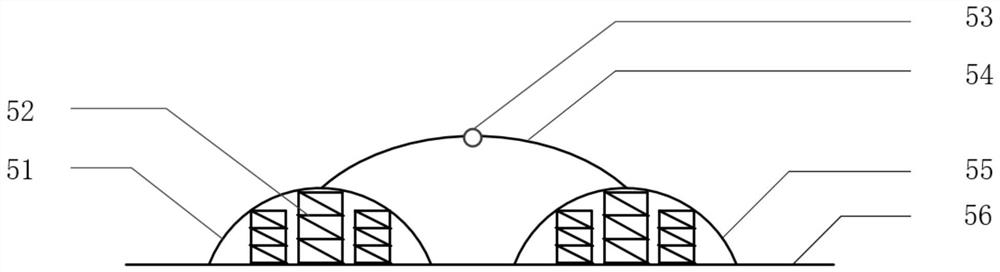
[0034] Such as figure 2 Shown is the structural diagram of the first-level shock-absorbing self-stabilizing system. The hinge connection point 11 on the upper part of the arch bridge is the connection point connecting the second-level shock-absorbing and self-stabilizing system. The external force borne will be transmitted from both ends to the alloy arch bridge A51 and the alloy arch bridge B54. When the unmanned captain buoy 6 is subjected to an upward impact force, the alloy arch bridge A51 and the alloy arch bridge B54 are first deformed by the impact force to slow down the huge impact force brought by the bottom of the unmanned ship. Metal rubber shock absorbers 52 are added to the alloy arch bridge A51 and the alloy arch bridge B54 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More