Attitude autonomous redundant integrated navigation algorithm
A combined navigation and algorithm technology, applied in navigation calculation tools, navigation, mapping and navigation, etc., can solve problems such as long convergence time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
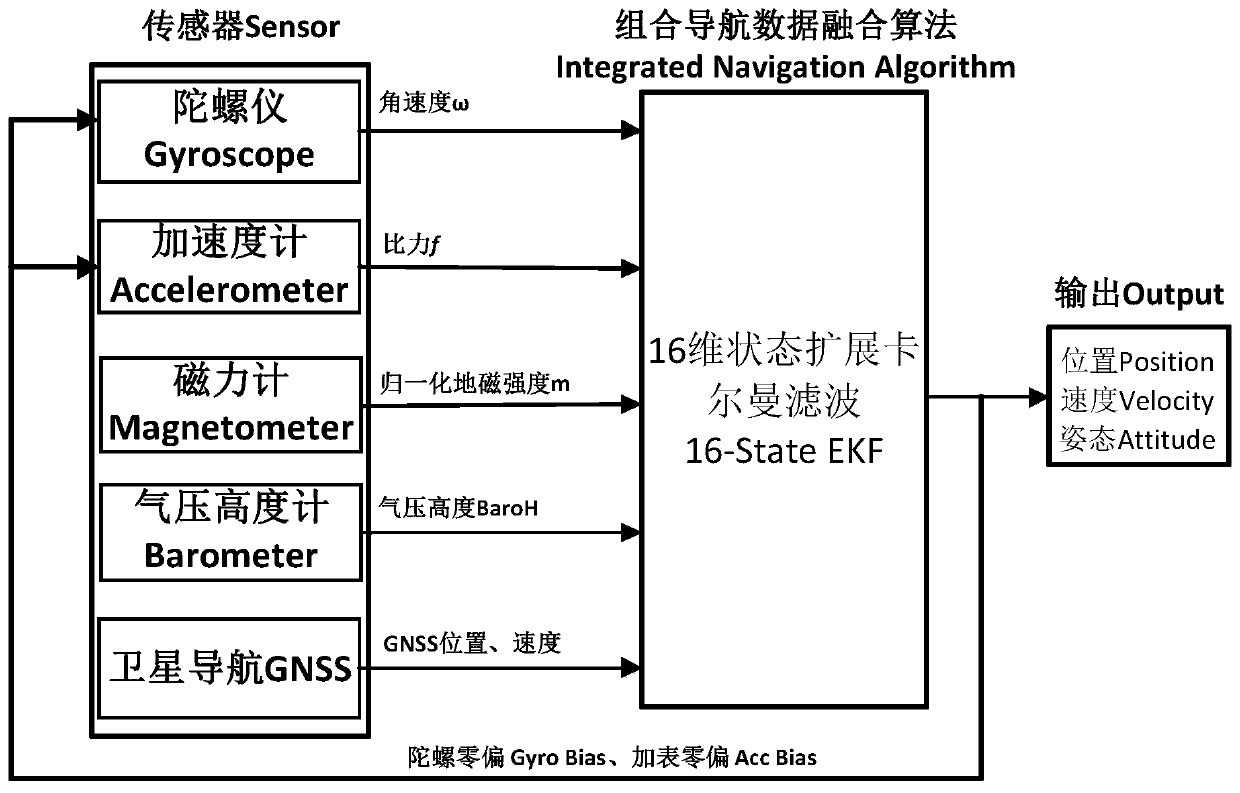
[0077] The present invention will be described in detail in conjunction with accompanying drawing now. This figure is a simplified schematic diagram only illustrating the basic structure of the present invention in a schematic manner, so it only shows the components relevant to the present invention.
[0078] Such as figure 1 As shown, the integrated navigation system involved in the present invention includes IMU, GNSS, magnetometer and barometric altimeter installed on the carrier, wherein,
[0079] The IMU contains a three-axis orthogonal gyroscope and a three-axis orthogonal accelerometer, which are used to measure angular velocity and acceleration (specific force); the GNSS receiver is used to output the position and velocity of satellite navigation; the three-axis orthogonal magnetometer is used for Geomagnetic measurement; the barometric altimeter is used to measure the atmospheric pressure, so as to convert the barometric altitude.
[0080] Such as Figure 1-Figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More