

Method for controlling unmanned aerial vehicle based on maneuvering action chain and device
A technology of maneuvering action and control method, which is applied to non-electric variable control, target-seeking control, motor vehicles, etc., can solve the problem of heavy manipulation burden of commanders, and achieves lightening of the manipulation burden, strong maneuverability, and reduced manipulation burden. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings. In the following description, for the purpose of explanation and not limitation, specific details are set forth to help a comprehensive understanding of the present invention. However, it is obvious to those skilled in the art that the present invention can also be practiced in other embodiments that depart from these specific details.
[0036] It should be noted here that in order to avoid obscuring the present invention due to unnecessary details, only the device structure and / or processing steps closely related to the solution according to the present invention are shown in the drawings, and the present invention is omitted. Invent other details that are not relevant.
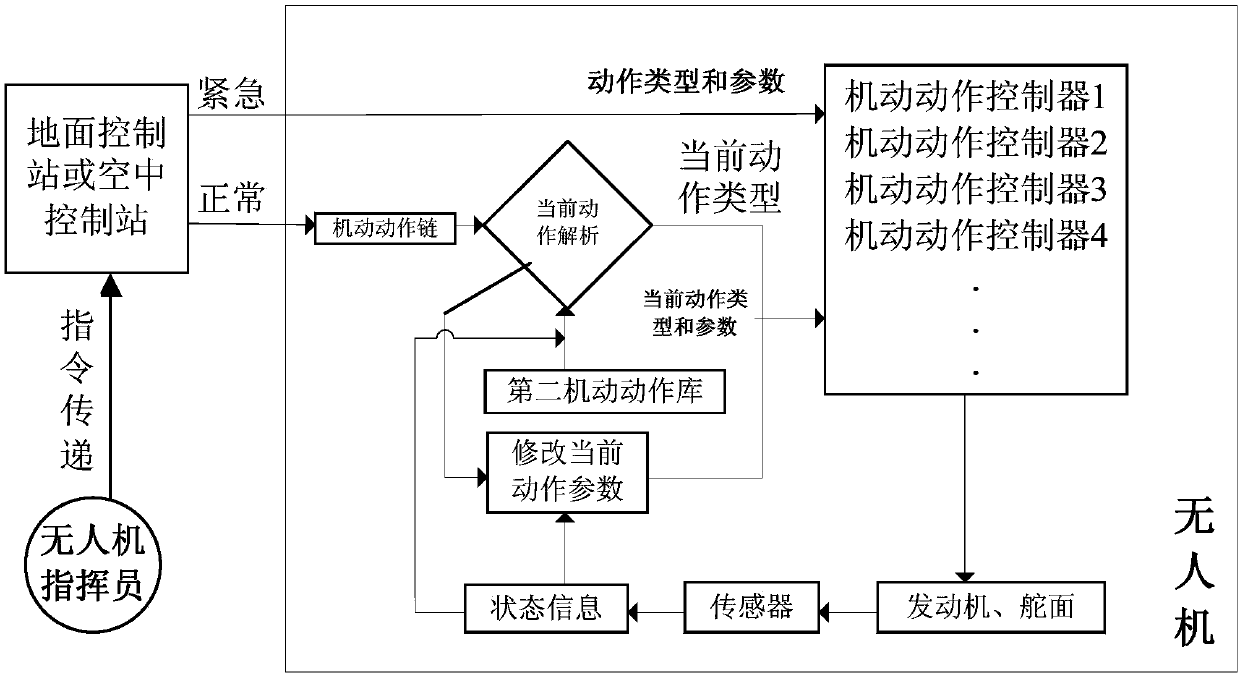
[0037] In order to design drone maneuvers suitable for air combat, embodiments of the present invention provide a drone control method and drone based on a maneuver chain. Start...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More