

A binocular vision SLAM method combining point and line characteristics
A binocular vision, point-and-line technology, applied in the fields of photogrammetry and computer vision, can solve the problems of reduced algorithm accuracy, over-segmentation of line segments, and inefficient calculation methods, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
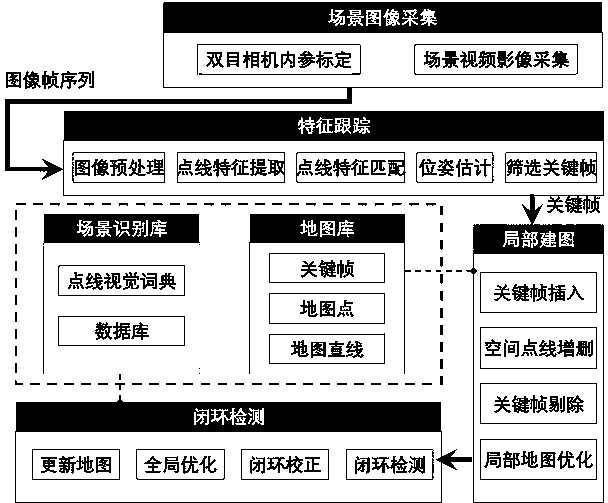
[0030] Such as figure 1 As shown, a binocular vision SLAM method combining point and line features mainly includes the following steps:
[0031] Step 1: Use the camera to obtain multiple fixed-size checkerboard image data under different viewing angles; use Zhang Zhengyou’s camera calibration method to calculate the internal parameters of the camera on the acquired checkerboard image data to obtain camera calibration results.
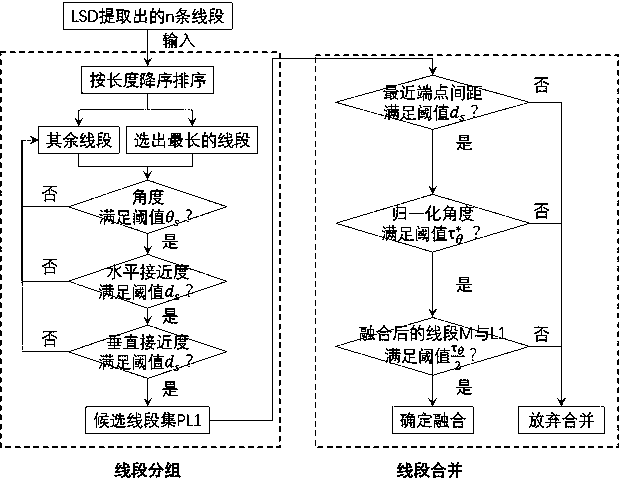
[0032] Step 2, use the image filter to filter out the dense feature area in the image, the specific operation sub-steps are as follows,
[0033] Step 2.1, calculate the gradient τ of the pixel points in the image for the sequence of image frames acquired in the video ij , according to the pixel gradient strength threshold G s , the gradient value is higher than the threshold G s The pixels marked as 1, below the thre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More