

Power exoskeleton robot
An exoskeleton robot and power technology, applied in the field of robotics, can solve the problems of the user's extra burden of accidental injury, poor wearing comfort, low exercise flexibility, etc., and achieve the effect of reducing physical energy consumption and overwork injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
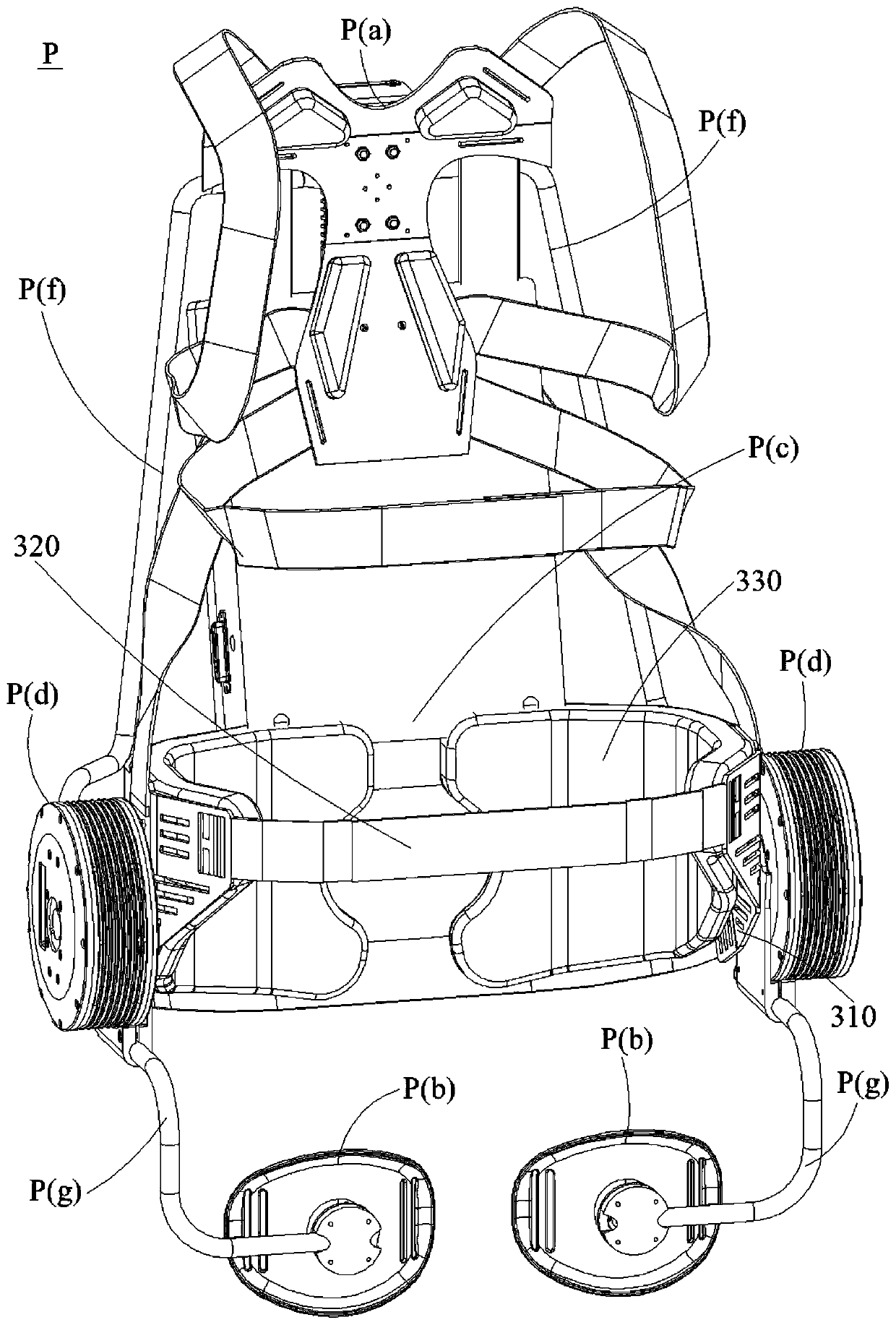
[0038] Please refer to Figure 1~3 , this embodiment discloses a powered exoskeleton robot P, the powered exoskeleton robot P includes a chest and back wearing unit P(a), a leg wearing unit P(b), a hip wearing unit P(c) and a power output unit P(d), providing active assistance to the hip muscles and waist muscles, reducing physical energy consumption and overwork injuries during walking and bending.
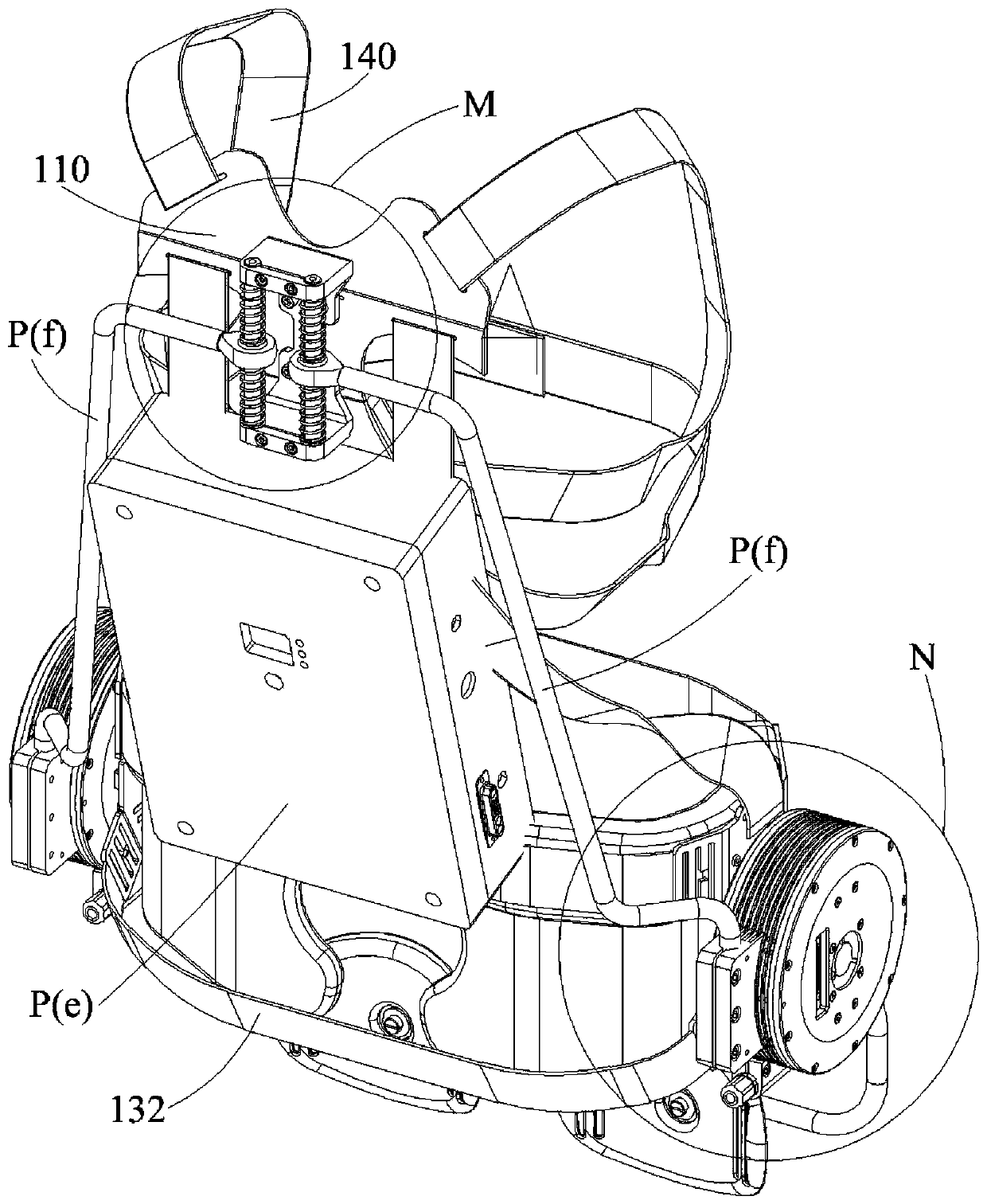
[0039] The chest and back wearing unit P(a) is worn and supported on the chest and back of the user, and is connected to the power output unit P(d) through the first transmission rod P(f). Under the support of dynamic moment, it overcomes the gravity of the user's upper body (including the upper torso and head), replaces or at least assists the hip muscles to support the user's upper body, reduces the load on the hip muscles when the human body walks and bends, and then reduces Physical exertion and overuse injury.
[0040] It can be understood that when the chest-back wearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More