Multi-sensor fusion positioning method for low-speed parking and driving scene
A driving scene and integrated positioning technology, which is applied in the field of vehicle electronics, can solve the problems that cannot meet the application requirements of typical automatic driving scenes, and the positioning method is single and unusable, so as to improve the positioning accuracy of parking, control the system cost, and improve the The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
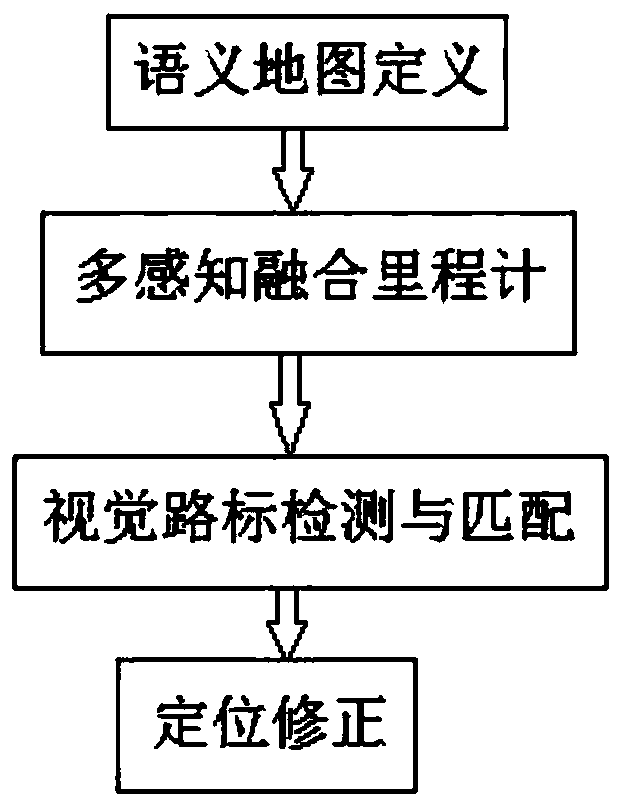
[0056] Example: such as figure 1 A multi-sensor fusion positioning method for a low-speed parking driving scene is shown, including the following steps:
[0057] (1-1) Semantic map definition:
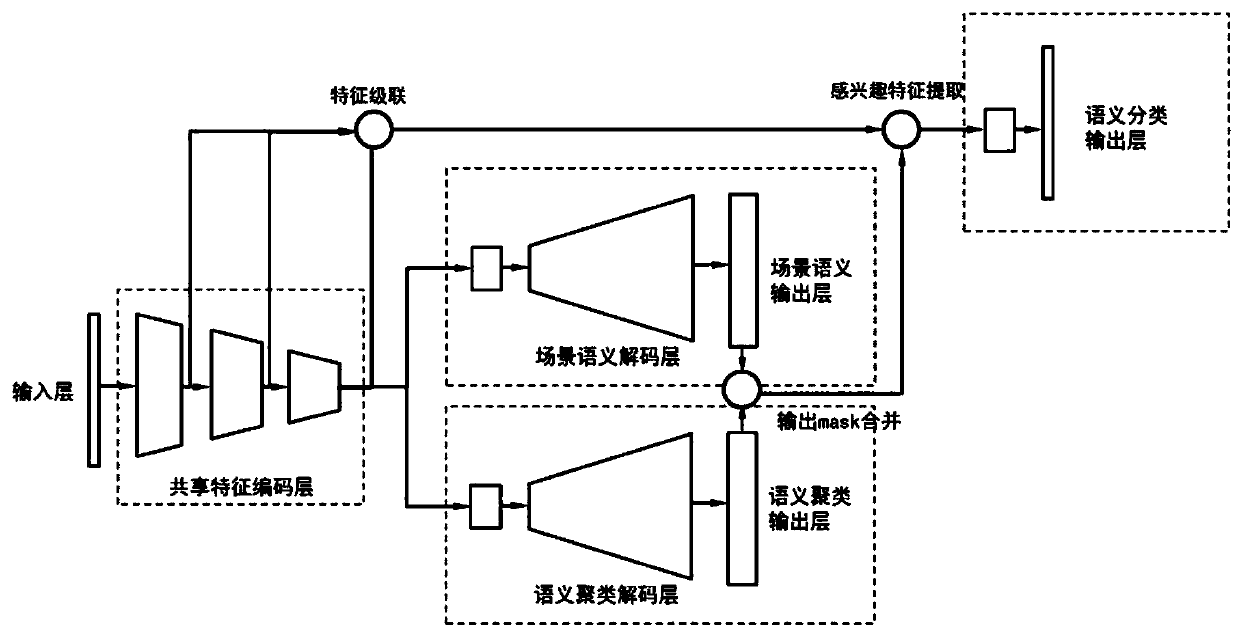
[0058] The parking lot semantic structured data is defined as shown in figure 2 As shown, it mainly includes parking space information, lane information and positioning landmark information, which can be abstracted from the parking lot design drawing. Among them, the parking space information mainly includes but not limited to attributes such as parking space id, length and width, orientation, and the lane to which it belongs; the lane information mainly includes but not limited to attributes such as lane id, length, curvature, boundary type, front and rear associated lanes, and the floor to which it belongs; positioning road signs The information mainly includes but not limited to parking space id, road guidance signs and aerial suspension guidance signs, etc.; all kinds of informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com