

Multi-underwater-robot formation control method based on reinforcement learning
A technology of underwater robot and control method, which is applied in the direction of three-dimensional position/channel control, etc., can solve the problems of underwater robot visual impact, formation control cannot be completed, etc., and achieve the effect of intelligent tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawing:
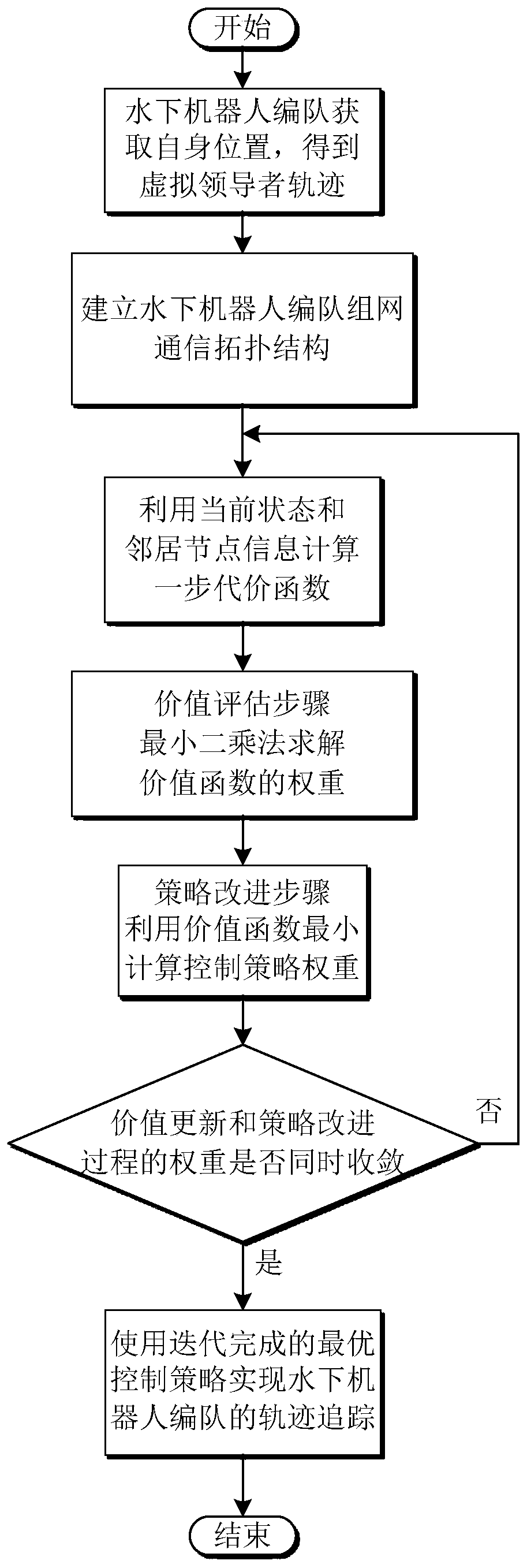
[0034] Such as figure 1 Shown, the inventive method comprises the following steps:
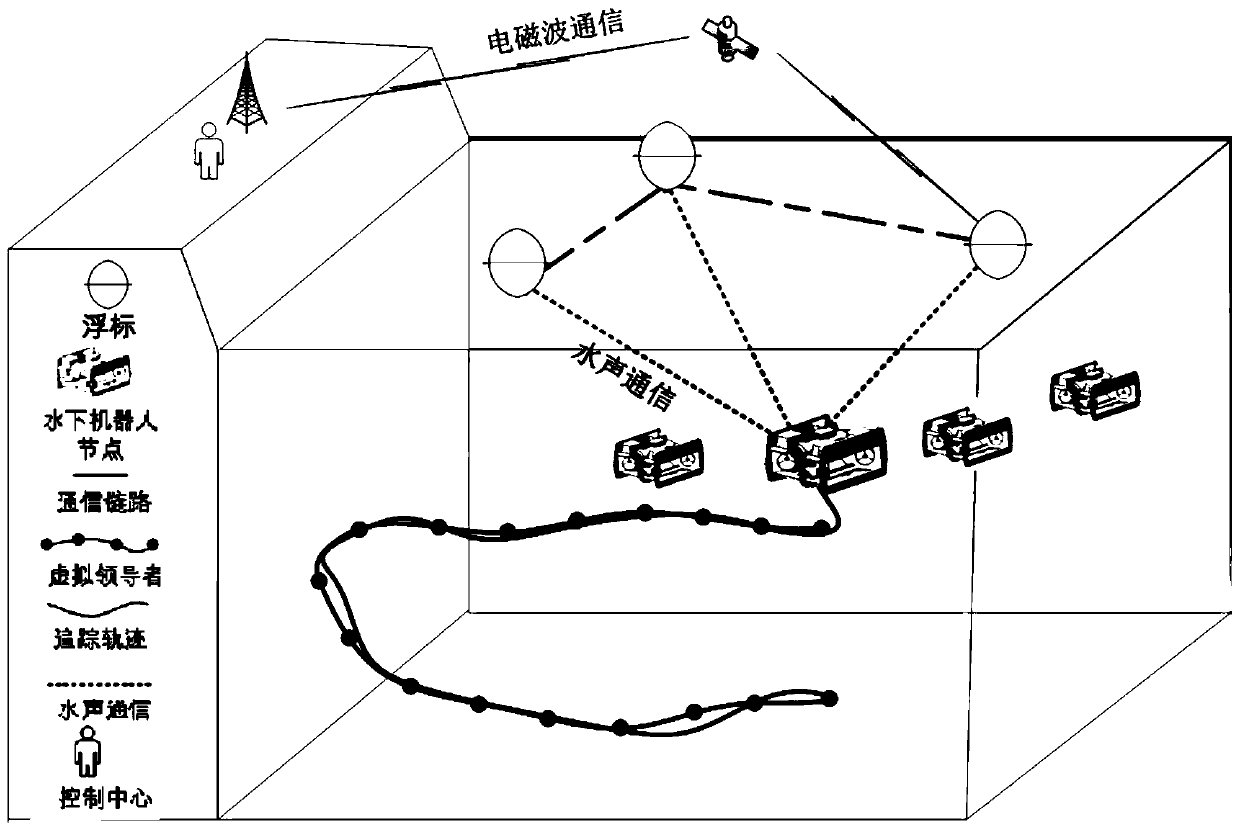
[0035] steps as figure 2 As shown, a buoy relay is set on the water surface, and the underwater robot formation with a positioning device performs self-positioning through the buoy relay underwater, and sets the expected trajectory as the virtual leader of the underwater robot formation, and sends it to each underwater robot. In order to reduce the tracking error of the underwater robot formation and improve the efficiency, networking communication is required between each underwater robot.
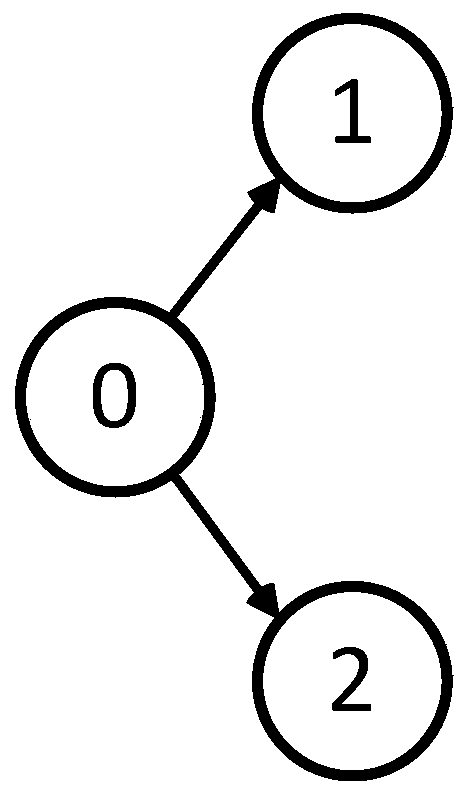
[0036] Step 2 In order to form a network communication network between underwater robot nodes during operation, establish a topological communication structure G=(V,ξ,A) of underwater robot formation. Among them, G is a weighted directed graph composed of each underwater robot node, V={v 1 ,v 2 ,....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More