

Quad-rotor UAV (unmanned aerial vehicle) formation fault tolerance method based on multi-UAV distributed control
A four-rotor UAV, distributed control technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problem that the quadrotor UAV cannot control the position and speed of the UAV at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
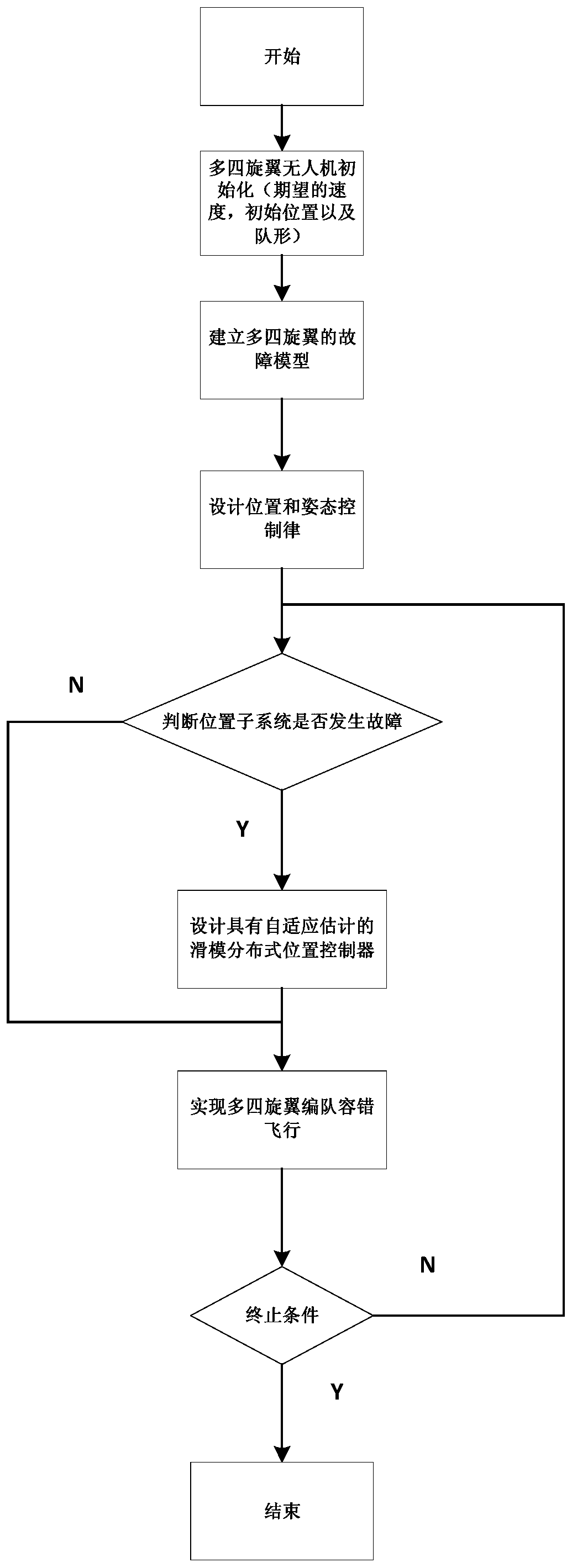
[0044] In the embodiment of the present invention, a quadrotor UAV formation fault-tolerant method based on multi-UAV distributed control is provided, see figure 1 , the method specifically includes the following steps:
[0045] S1. Construct the fault dynamic model of multi-quadrotor UAV:
[0046]
[0047] in, θ i ,ψ i are the roll angle, pitch angle and yaw angle of the i-th quadrotor UAV; x i ,y i ,z iis the position coordinate of the center of mass of the i-th quadrotor UAV; l is the distance from the end of the rotor to the front end of the rotor; m is the mass of the quadrotor UAV, I is the moment of inertia of each axis, K i is the drag coefficient, σ i is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More