

A multi-temporal point cloud automatic registration method based on shape-invariant features
An automatic registration and multi-temporal technology, applied in image analysis, instrumentation, computing, etc., can solve the problems of large point cloud changes, low registration efficiency, and poor accuracy, and achieve efficient automatic registration and high stability registration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
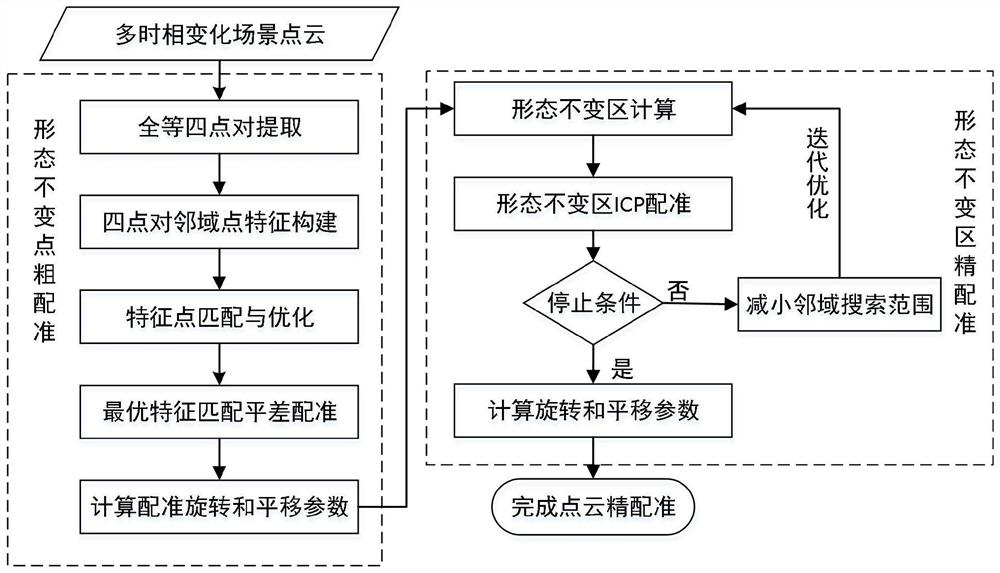
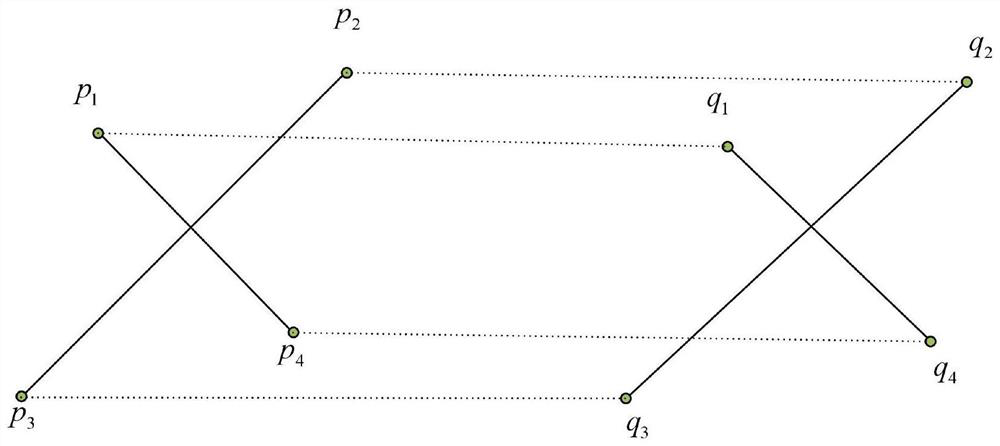
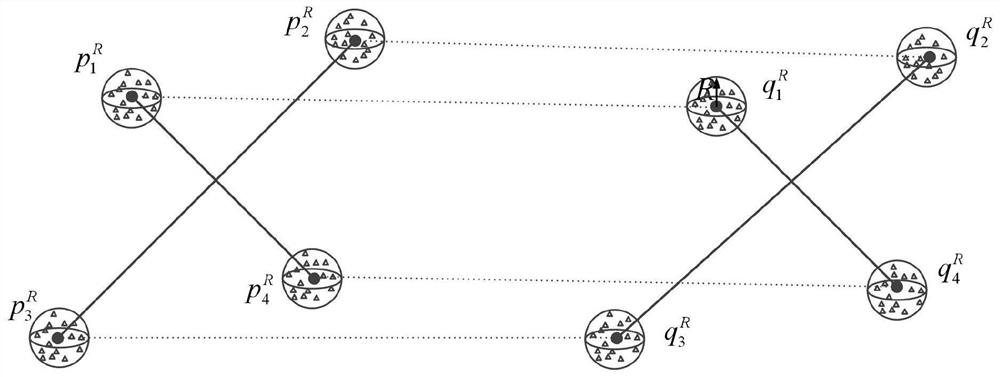
[0043] by figure 2 , image 3 and Figure 4 As an example, the rough registration method of changing scene point clouds based on shape-invariant points is described in detail. The dots in the figure represent the positions of congruent four-point pairs, the triangles represent the four-point-based neighborhood points, and the lines between the points represent Feature matching correspondence. Its specific implementation is as follows:
[0044] Step 1: If figure 2 As shown, using the affine invariant constraints to find four congruent pairs of the reference point cloud P and the point cloud to be registered Q: Aiming at the construction of four coplanar points in P, under the constraint of formula (1), the i-th iteration of the 4PCS algorithm starts from the reference Randomly find three points in the point cloud to form a plane, denoted as (p 1i ,p 2i ,p 3i ), calculate the coordinate p of the fourth point satisfying the condition according to formula (2) 4i , formin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More