

Three-dimensional information acquisition method and device based on line laser and binocular vision
A technology of three-dimensional information and acquisition method, applied in the field of three-dimensional information acquisition based on line laser and binocular vision, can solve problems such as extracting three-dimensional information, and achieve the effects of high measurement accuracy, good real-time performance, and accurate measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In the following description, numerous specific details are set forth in order to provide a thorough understanding of the specification. However, this specification can be implemented in many other ways different from those described here, and those skilled in the art can make similar promotions without violating the connotation of this specification, so this specification is not limited by the specific implementation disclosed below.
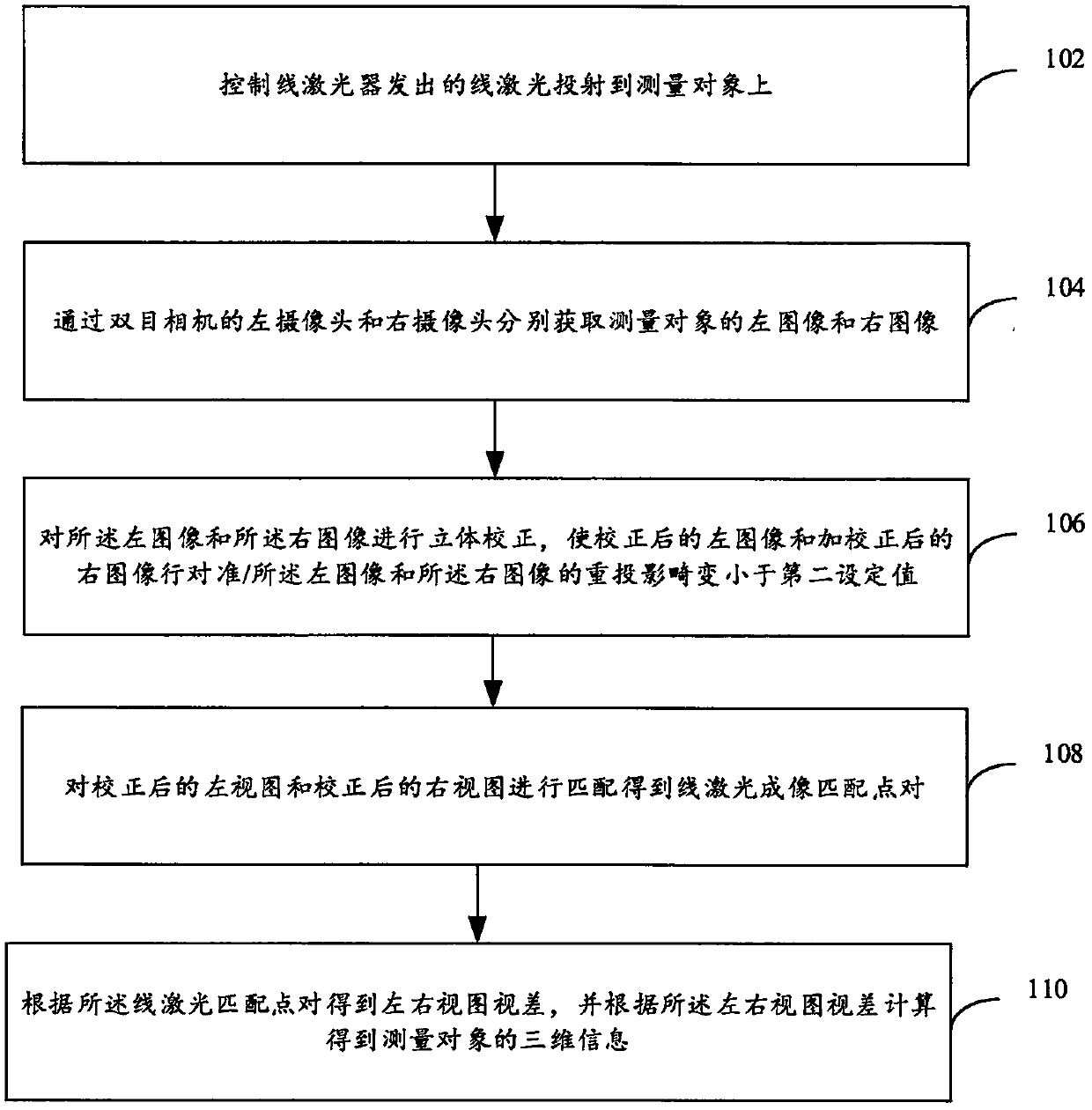
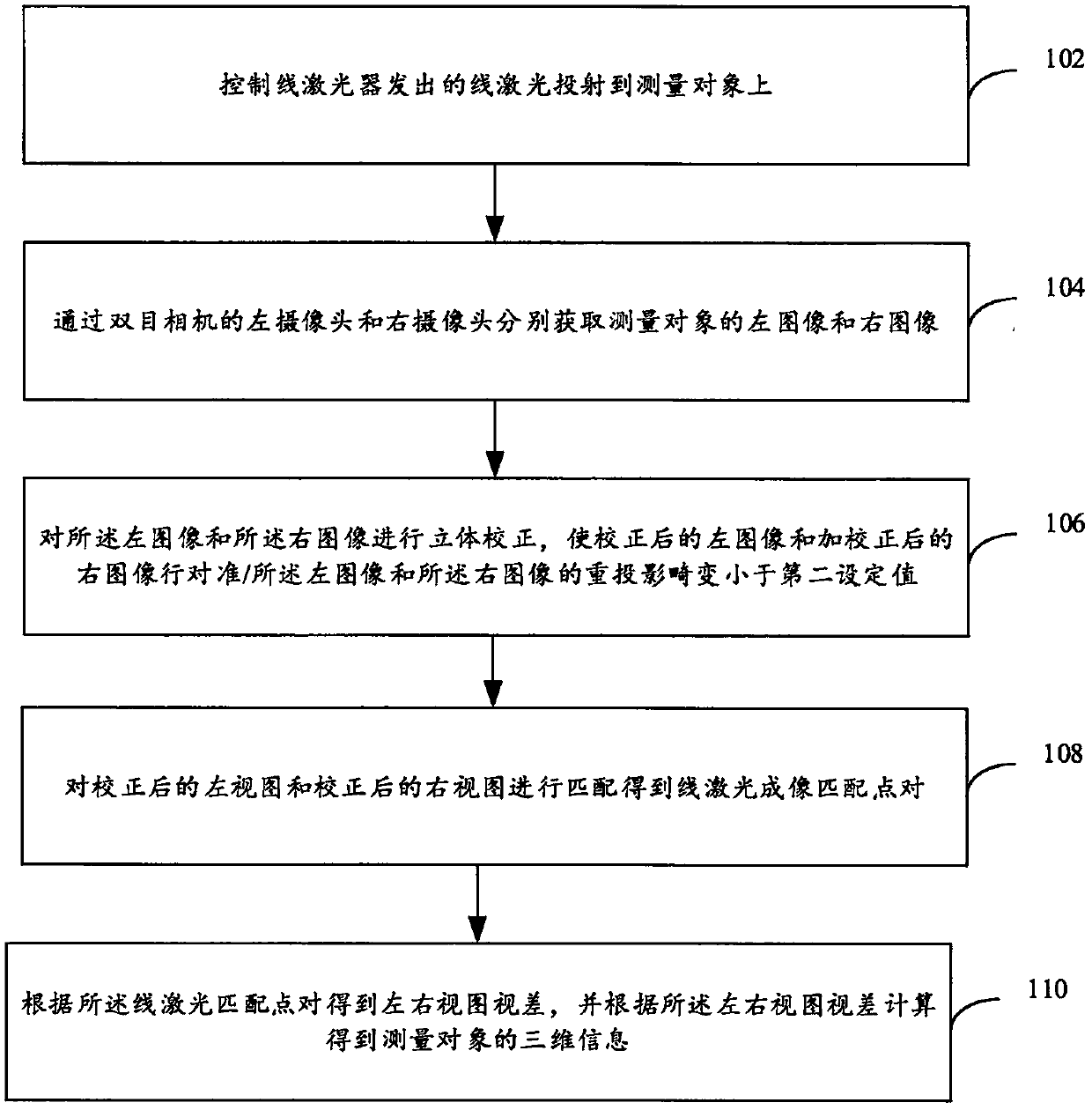
[0061] figure 1 It is a schematic flow chart showing a three-dimensional information acquisition method based on line laser and binocular vision according to an embodiment of this specification, and the method includes:
[0062] Step 102: controlling the line laser emitted by the line laser to project onto the measurement object;
[0063] Step 104: Obtain the left image and the right image of the measurement object respectively through the left camera and the right camera of the binocular camera, wherein the parameters of the left camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More