Tilt measurement method of surveying and mapping integrated machine based on GNSS receiver and IMU sensor
A tilt measurement and sensor technology, applied in the field of surveying and mapping, can solve problems such as low operation efficiency and large tilt measurement error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
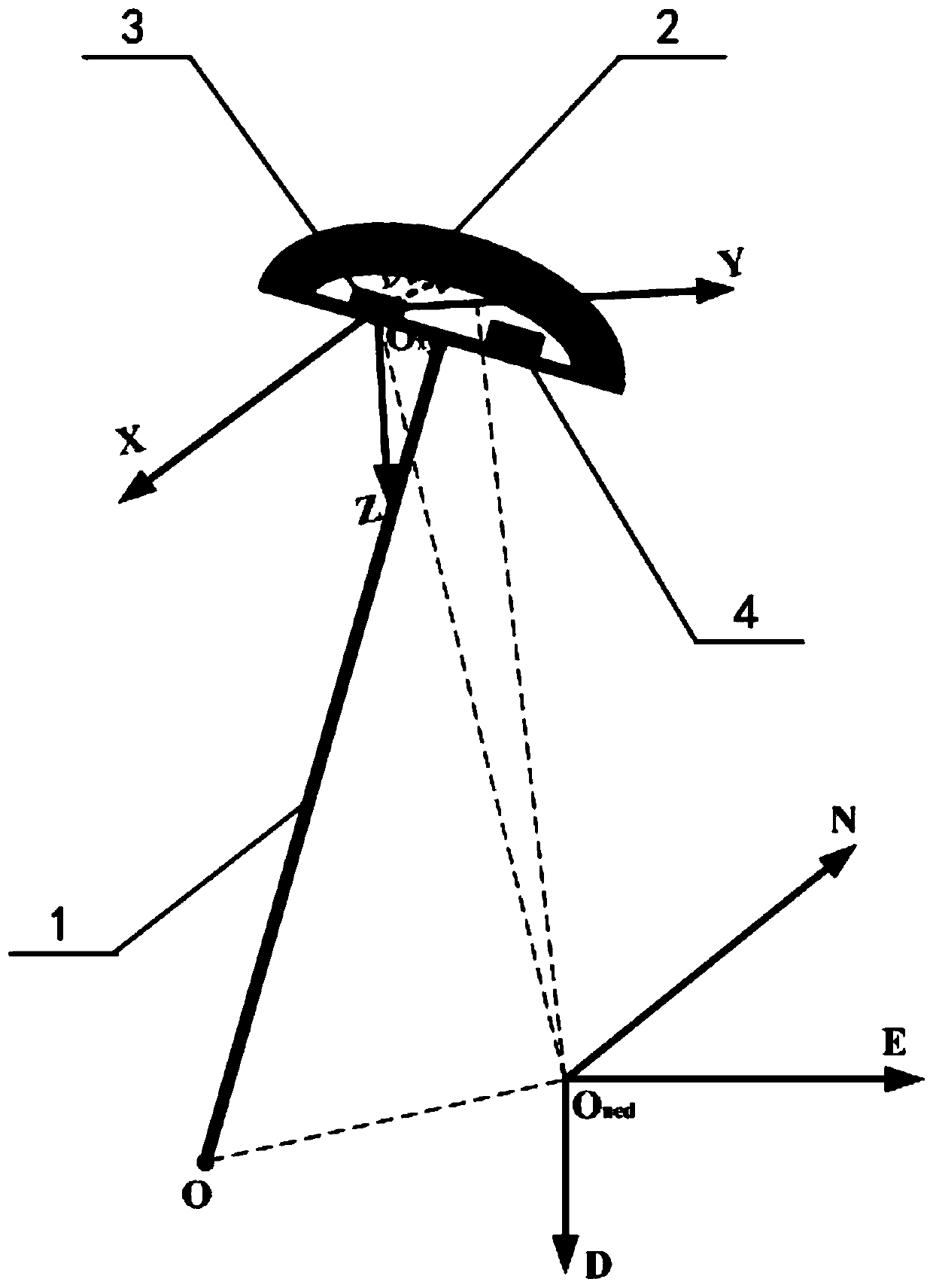
[0087] like Figure 1~2 As shown, the integrated surveying and mapping machine provided in this embodiment includes a centering pole 1, a GNSS receiver 2, an IMU sensor 3 and a microprocessor 4, wherein the GNSS receiver 2 is arranged on the centering pole 1 At the top, the IMU sensor 3 is arranged on the centering rod 1 and includes a 3-axis accelerometer and a 3-axis gyroscope, and the microprocessor 4 is also arranged on the centering rod 1 and communicates with all The GNSS receiver 2 and the IMU sensor 3. like figure 1As shown, the centering pole 1, the GNSS receiver 2, the IMU sensor 3 and the microprocessor 4 are all common accessories of the existing surveying and mapping integrated machine, and the surveying and mapping integrated machine of this embodiment is compatible with the existing The difference of the all-in-one surveying and mapping machine is that the IMU sensor 3 can be arranged at any position of the centering rod 1 like the microprocessor 4 due to the ...
Embodiment 2
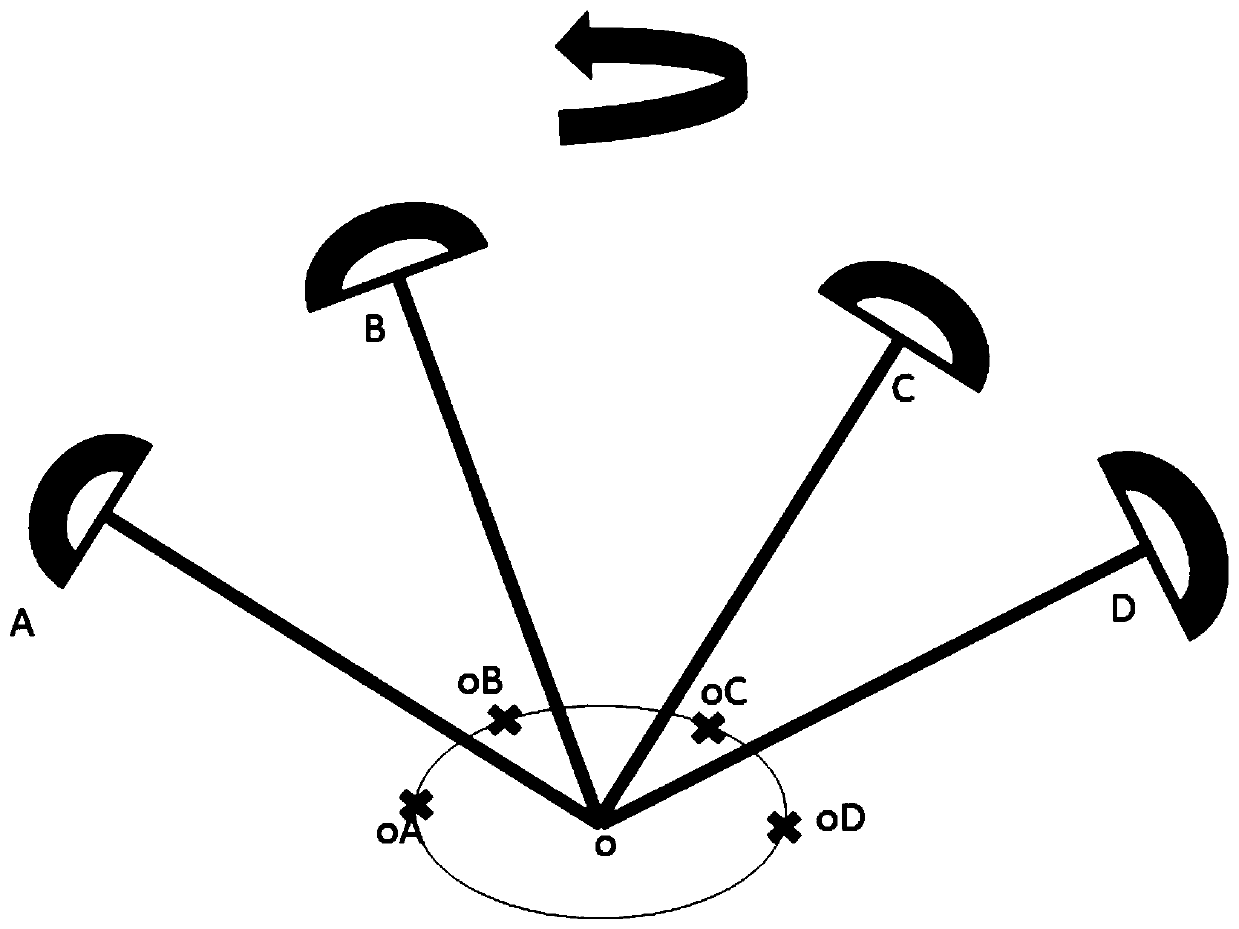
[0153] Such as image 3 As shown, this embodiment provides a further optimization solution based on Embodiment 1, that is, the tilt measurement method of the surveying and mapping integrated machine, which also includes the installation angle self-calibration method described in the following steps S201-S204 after the step S102 :
[0154] S201. Through the steps S103-S108, sequentially obtain the position coordinates of S centering rod bottoms obtained for different antenna phase center positions during the process of shaking the centering rod 1: ((φ O ) k1 (λ O ) k1 (h O ) k1 ) T , ((φ O ) k2 (λ O ) k2 (h O ) k2 ) T ,...,((φ O ) kS (λ O ) kS (h O ) kS ) T , wherein, S is a natural number not less than 2, and the position coordinate of the bottom end of the S-th centering rod is the newly acquired coordinate of the bottom end of the centering rod.
[0155] In the step S201, it is considered that the surveying and mapping integrated machine requires t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More