Laser-based amphibious three-dimensional visual detection device and detection method
A three-dimensional vision and detection device technology, applied in measurement devices, optical devices, instruments, etc., can solve problems such as limit constraints are no longer accurate, measurement environment complexity, camera parameters cannot be directly used, etc., to reduce the mismatch rate, The effect of improving the overall measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
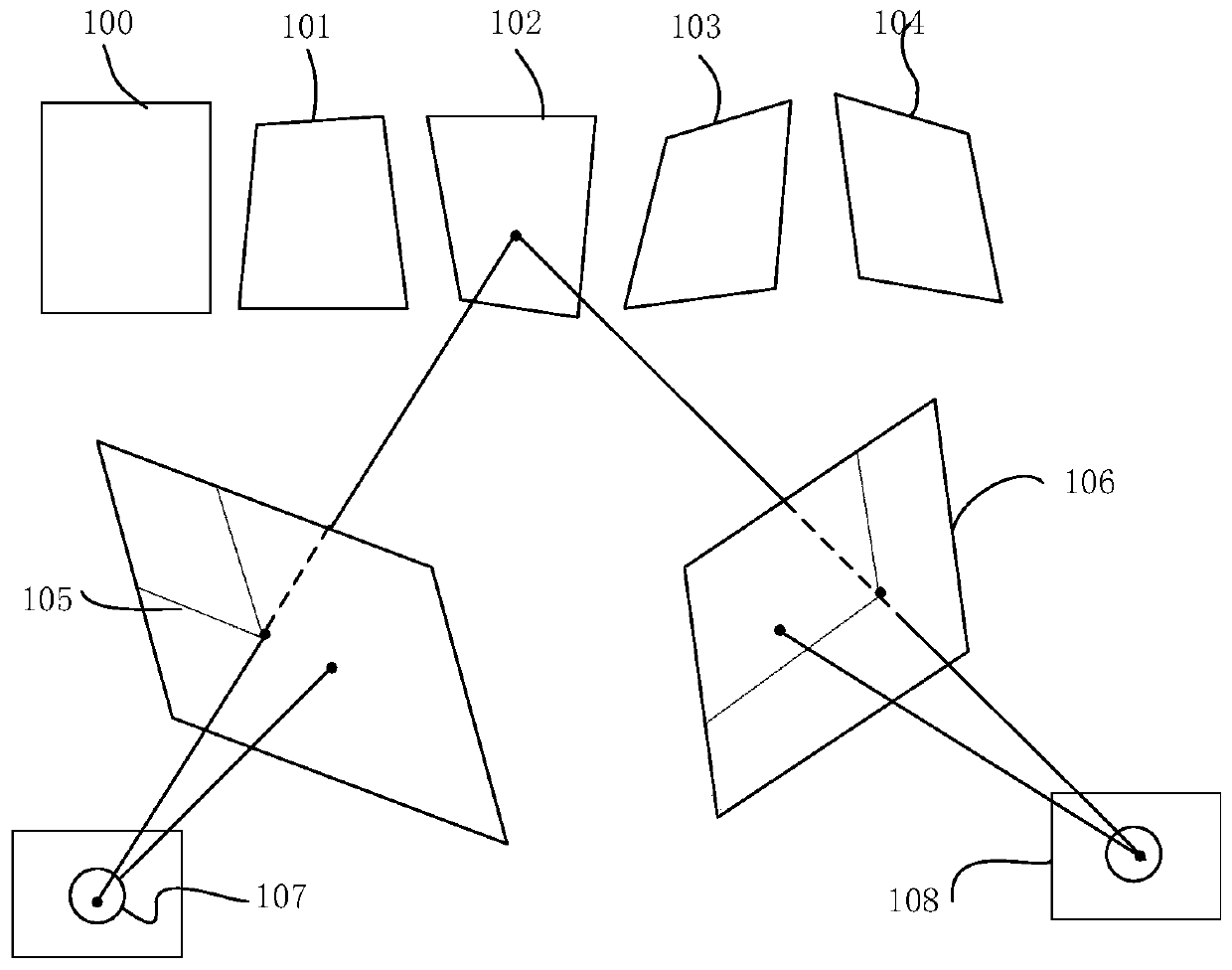
[0083] figure 1 It shows a schematic diagram of binocular stereo vision calibration according to an embodiment of the present invention. The left and right cameras (107, 108) simultaneously shoot the target at the coding point, and acquire the five-pose images (105, 106) of the target at different positions. The target postures are respectively: the system is facing the posture (100), the posture of tilting upward (101), the posture of tilting downward (102), the posture of tilting to the left (103), and the posture of tilting to the right (104).
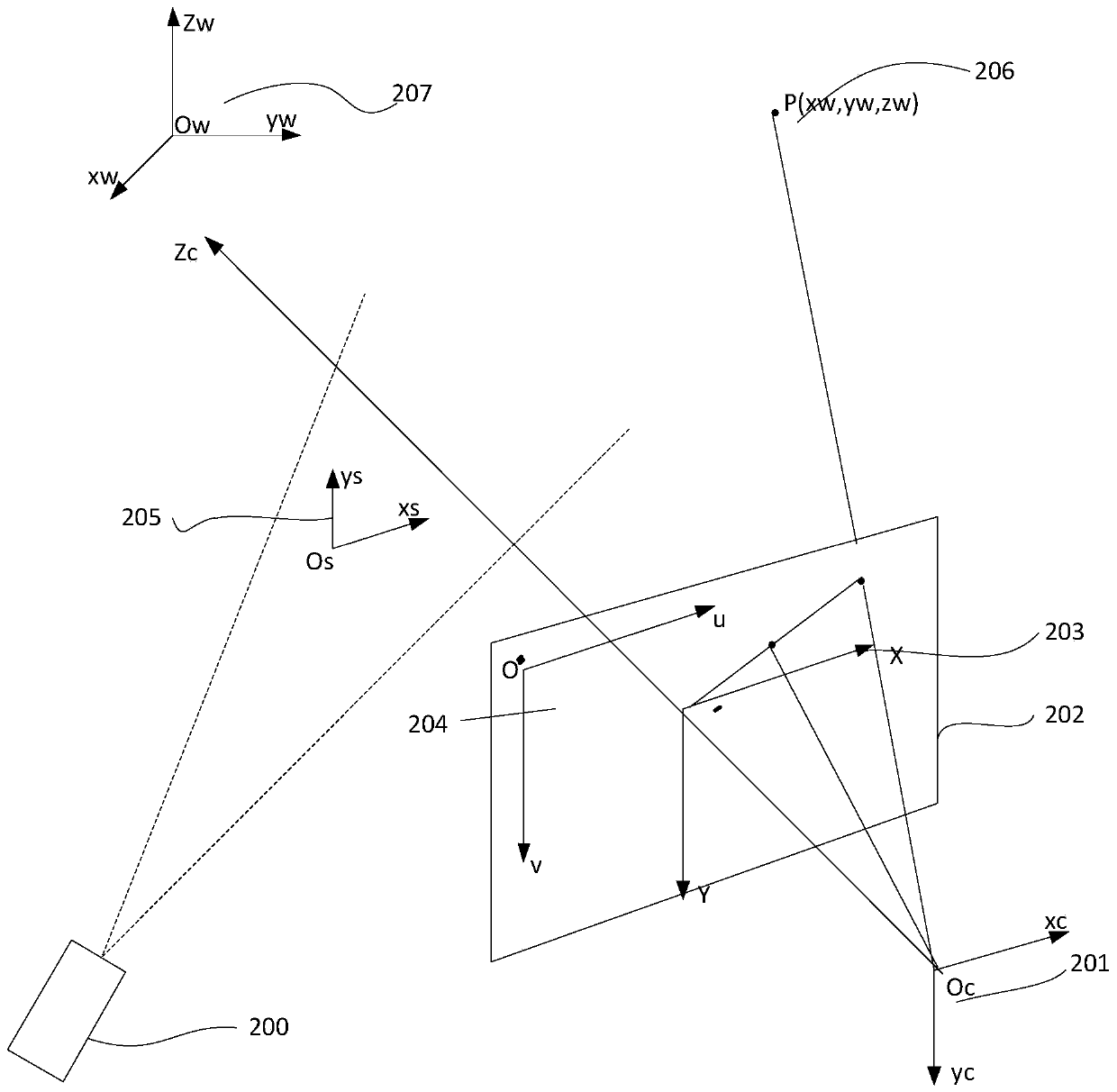
[0084] figure 2 A schematic diagram of structured light vision calibration according to an embodiment of the present invention is shown, showing a laser (200), a camera coordinate system (201), an image plane (202), an image plane coordinate system (203), a pixel coordinate system (204), a laser Plane coordinates (205), object points (206), and world coordinates (207). First, using Zhang Zhengyou's multi-plane calibration method,...
Embodiment 2
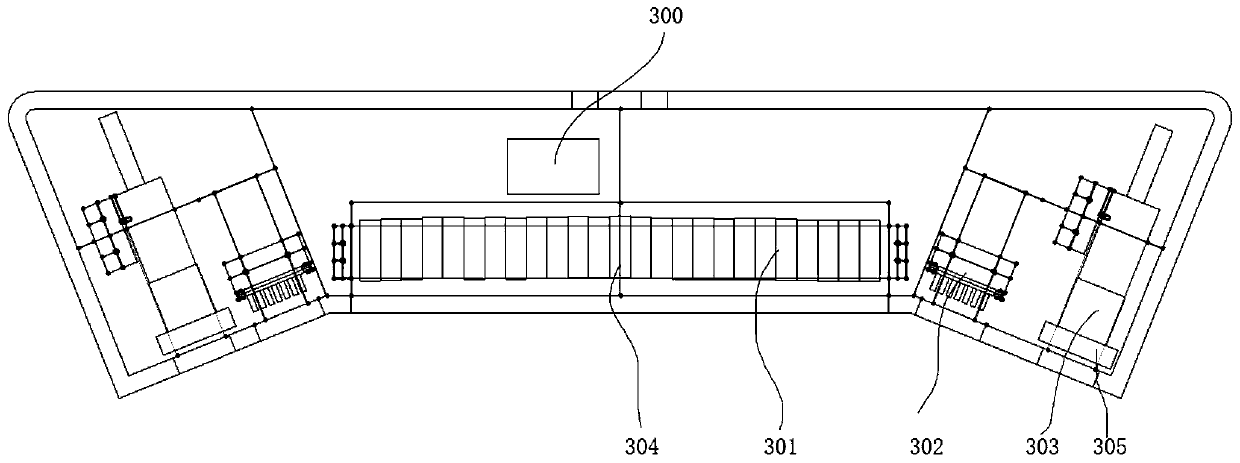
[0091] Figure 3 to Figure 4 A schematic structural diagram showing an embodiment of the present invention, as shown in the figure, the detection device includes an industrial camera (303), a point laser (304), a line laser (301), an optical filter (305), and an LED lighting device (302) and communication means (300).
[0092] Wherein, the point laser provides identification features, the line laser provides active features for binocular stereo vision as an integral part of structured light vision, and the communication device connects the camera and computer and is responsible for transmitting image acquisition commands and transmitting image information.
[0093] Figure 5 It shows that the present invention provides an implementation and operation method of the visual detection device. The specific implementation steps are as follows:
[0094] Step 1: Land-based dual-target positioning (400), the left and right cameras shoot the coded point target at the same time. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com