

Humanoid football robot path planning method based on dynamic window method
A football robot and dynamic window technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as difficulty in obtaining complete information, and achieve good results, fast processing speed, and high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings of the specification.
[0052] Path planning of a humanoid soccer robot based on a dynamic window method. The humanoid soccer robot is specifically a NAO robot. The path planning includes the following steps:
[0053] Step 1: Identify obstacles through the robot's own camera, and use the robot's monocular vision to locate and measure the distance to quickly obtain the distance and relative position between the robot and the obstacle.
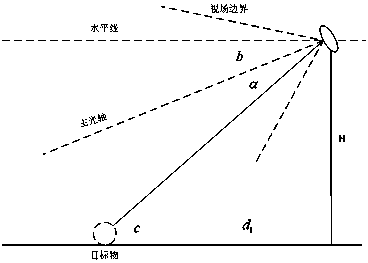
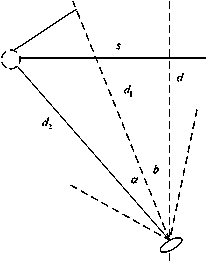
[0054] In the step 1, the forward and lateral distance between the robot and the target and the deflection angle ω of the robot are calculated by the pitch angle and the viewing angle of the robot camera combined with the height of the robot, and a safe distance to prevent collision is set.
[0055] Specifically, such as figure 2 As shown, the angle between the main optical axis of the camera and the horizontal p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More