

Multi-robot task allocation method
A task allocation, multi-robot technology, applied in the field of robotics, can solve the problems of inability to mobilize effective resources according to real-time conditions, reduce task time, and low resource utilization, and achieve the effect of less time to complete tasks, saving time, and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
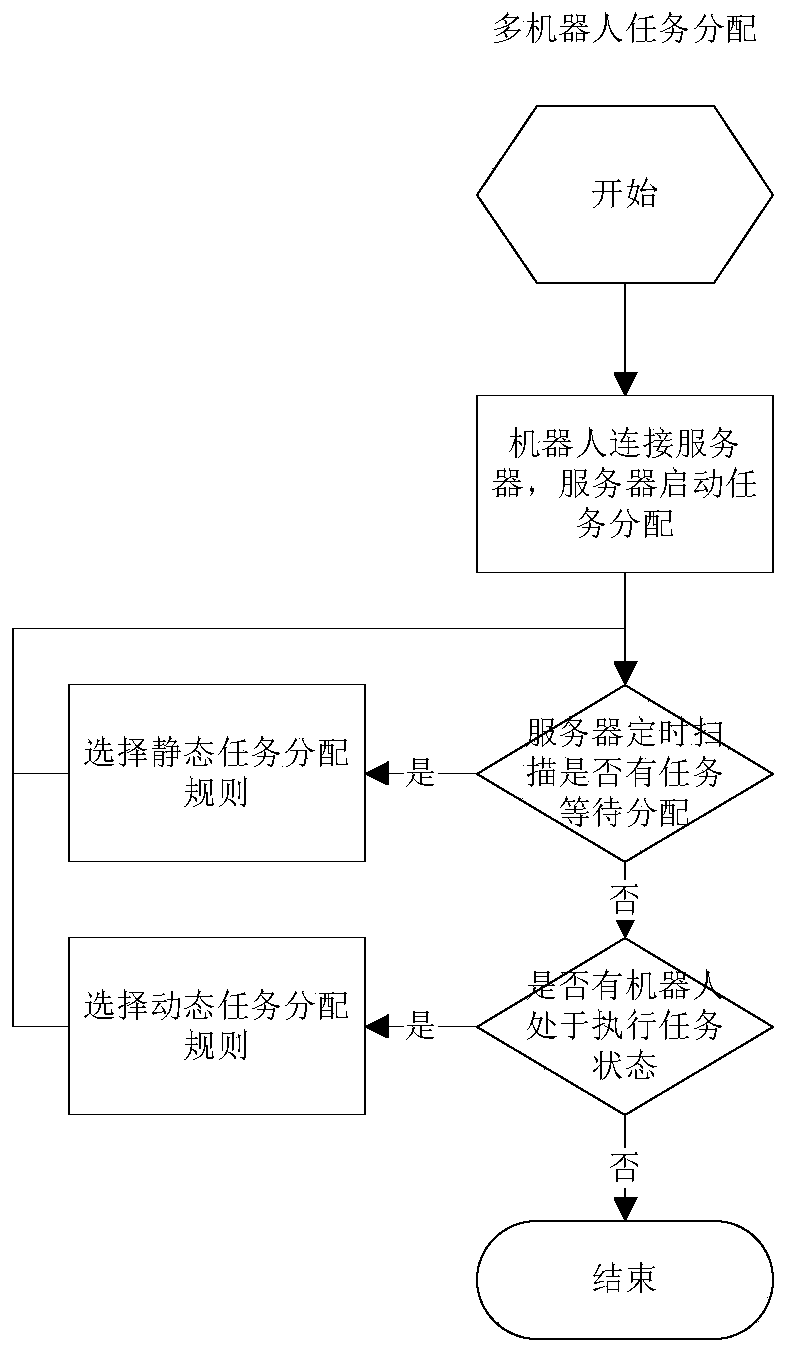
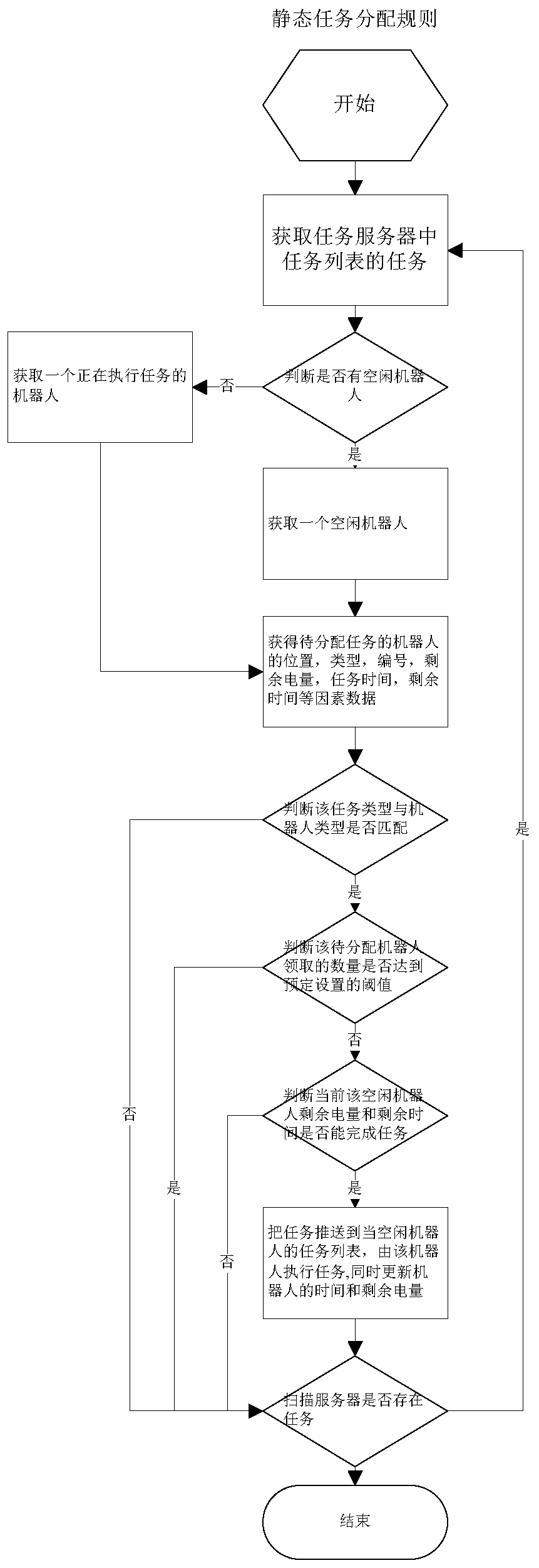
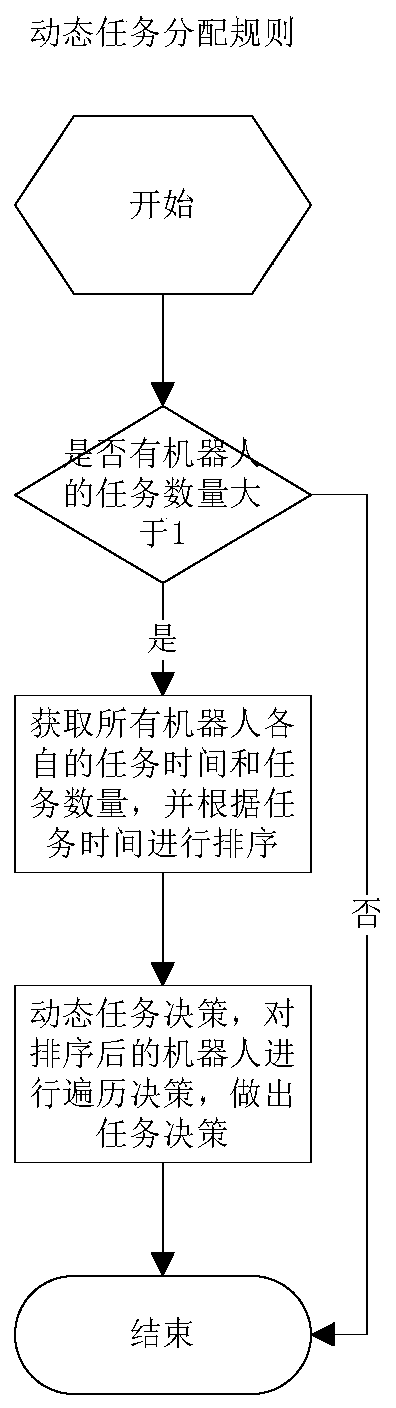
[0036] A multi-robot task assignment system in this embodiment includes: one or more robots, a server, and a client; wherein a task list is stored on the server, and the task list is used to represent tasks to be assigned to be executed. The robot also stores a task list, which is used to indicate the tasks to be performed by the robot, and can prioritize the tasks. The user logs in to the server through the client (such as a web page, APP) and ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More