

Automatic cooperative working assembly and application thereof in surgical instruments
A technology of working parts and components, applied in surgical manipulators, operations, applications, etc., can solve problems such as loss of tracking, occlusion of surgical instruments, and reduced experience of doctors' equipment, and achieve the effect of reducing occlusion, ensuring continuity, and reducing tracking range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. The embodiments of the present invention are only used to illustrate the technical solutions of the present invention without limitation. Although the present invention has been described in detail with reference to the preferred embodiments, those skilled in the art should understand that the technical solutions of the invention can be modified or equivalently replaced , without departing from the spirit and scope of the technical solution of the present invention, all of which shall be covered by the claims of the present invention.
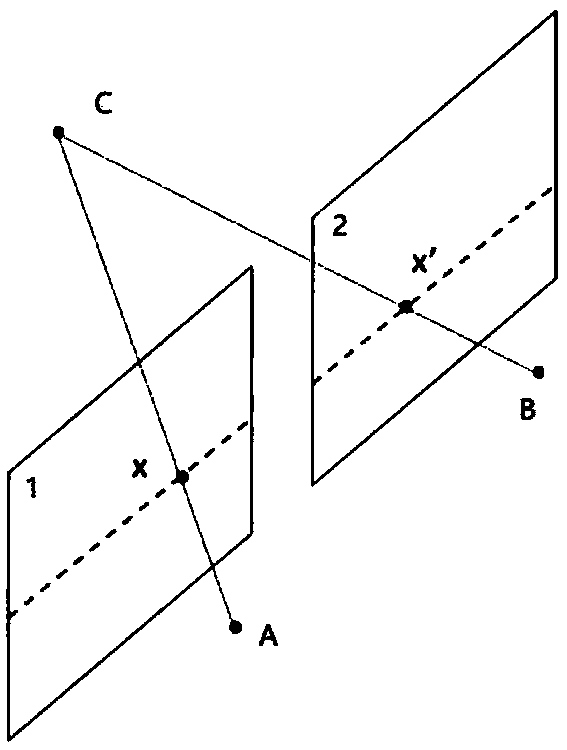
[0056] In this embodiment, the image acquisition device is loaded with different software modules, namely an optical positioning and tracking system and a visual monitoring and obstacle avoidance system. They can each be based on a set of cameras or based on a common set of cameras (one set consists of two came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More