

Dynamic testing platform for leg joints of foot-type bionic robot
A bionic robot and dynamic testing technology, which is applied in the direction of machine gear/transmission mechanism testing, etc., can solve the problems of lack of overall joint application effect testing, complicated process, high cost, etc., and achieve simple structure, time and cost saving, and convenient operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
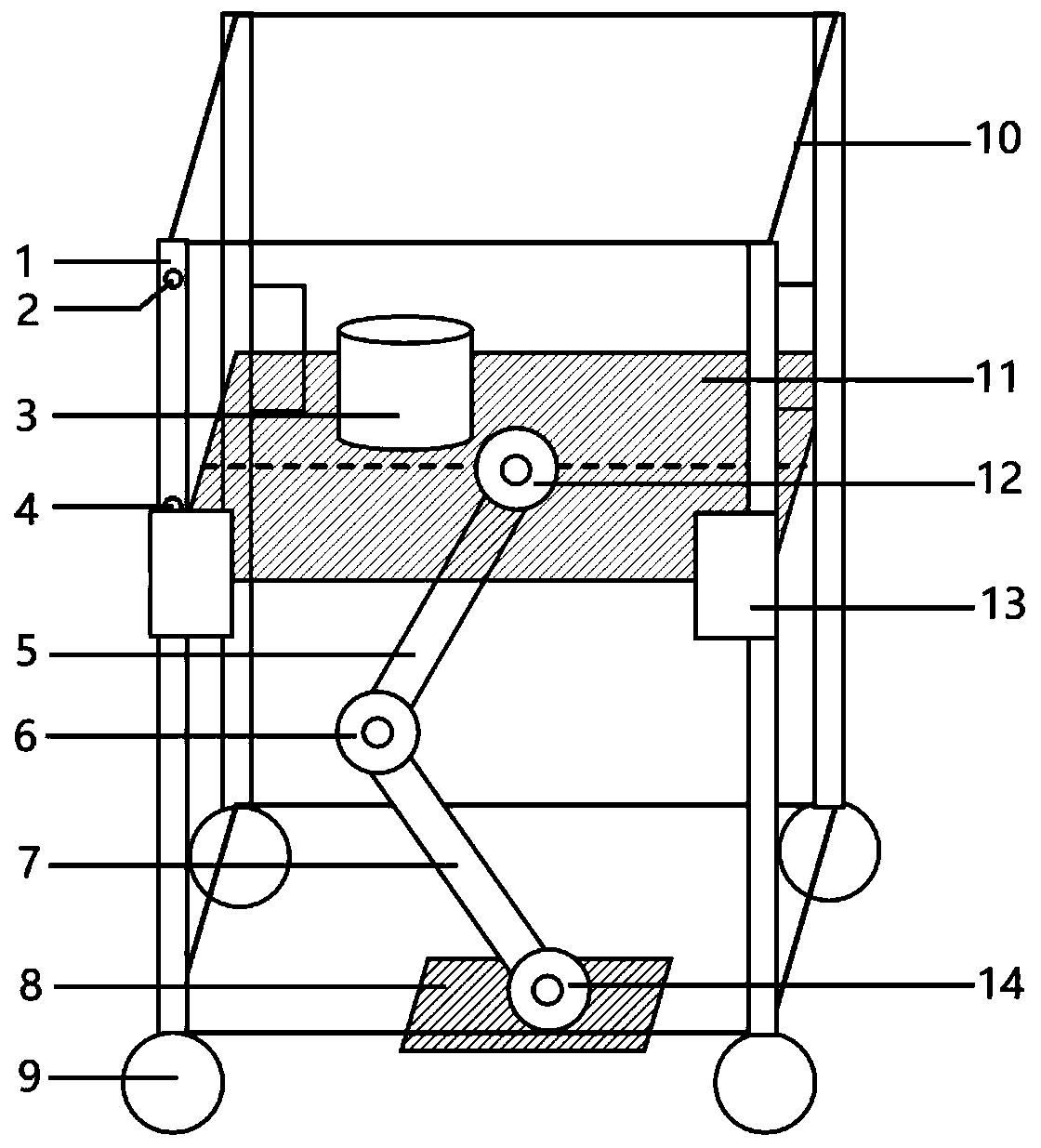
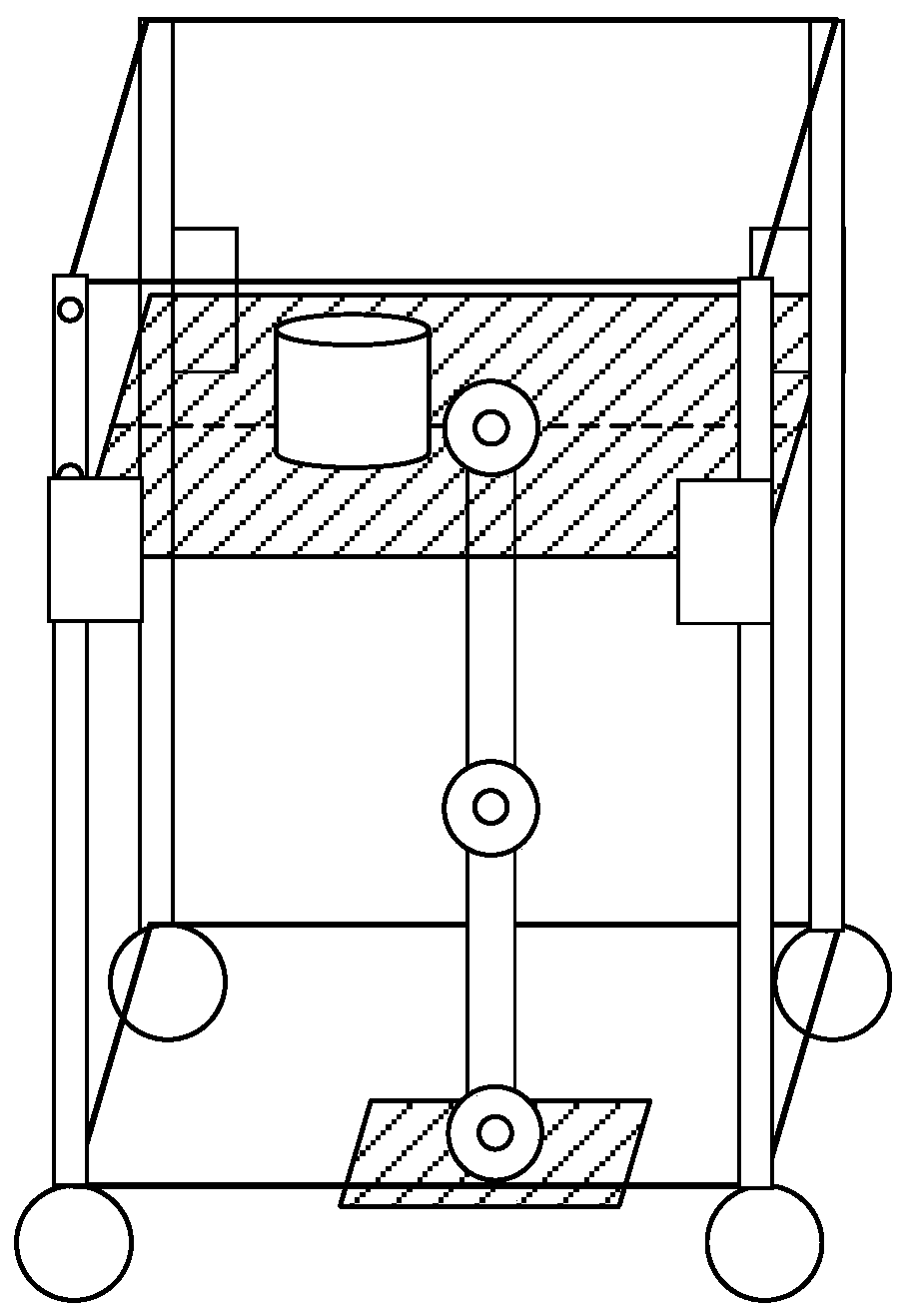
[0019] This embodiment is a dynamic test platform for leg joints of a footed bionic robot.
[0020] see figure 1 and figure 2 , the foot joint bionic robot leg joint dynamic test platform of this embodiment is made up of platform support, slide rail, simulation plate, position sensor, counterweight and tested robot joint; Wherein, platform support comprises two square frames 10, four Slide rail 1, four sliders 13 and four universal wheels 9, two square frames 10 are respectively located at the upper end and the lower end of vertical slide rail 1, and play the role of lateral support. The sliders 13 are respectively connected with the vertical slide rails, and can move up and down along the slide rails 1. The sliders 13 have a locking function;
[0021] The simulation panel includes an upper simulation panel 11, a lower simulation panel 8, a hip joint electric drive module 12 and an ankle joint electric drive module 14; the upper simulation panel 11 simulates the upper part ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More