

Initialization method and system of monocular SLAM algorithm
An initialization and algorithm technology, applied in computing, image data processing, instruments, etc., can solve the problems of poor versatility and flexibility in finding parking spaces, large deviations in point cloud generation, and low precision, so as to improve stability and calculation accuracy, and better The effect of initialization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
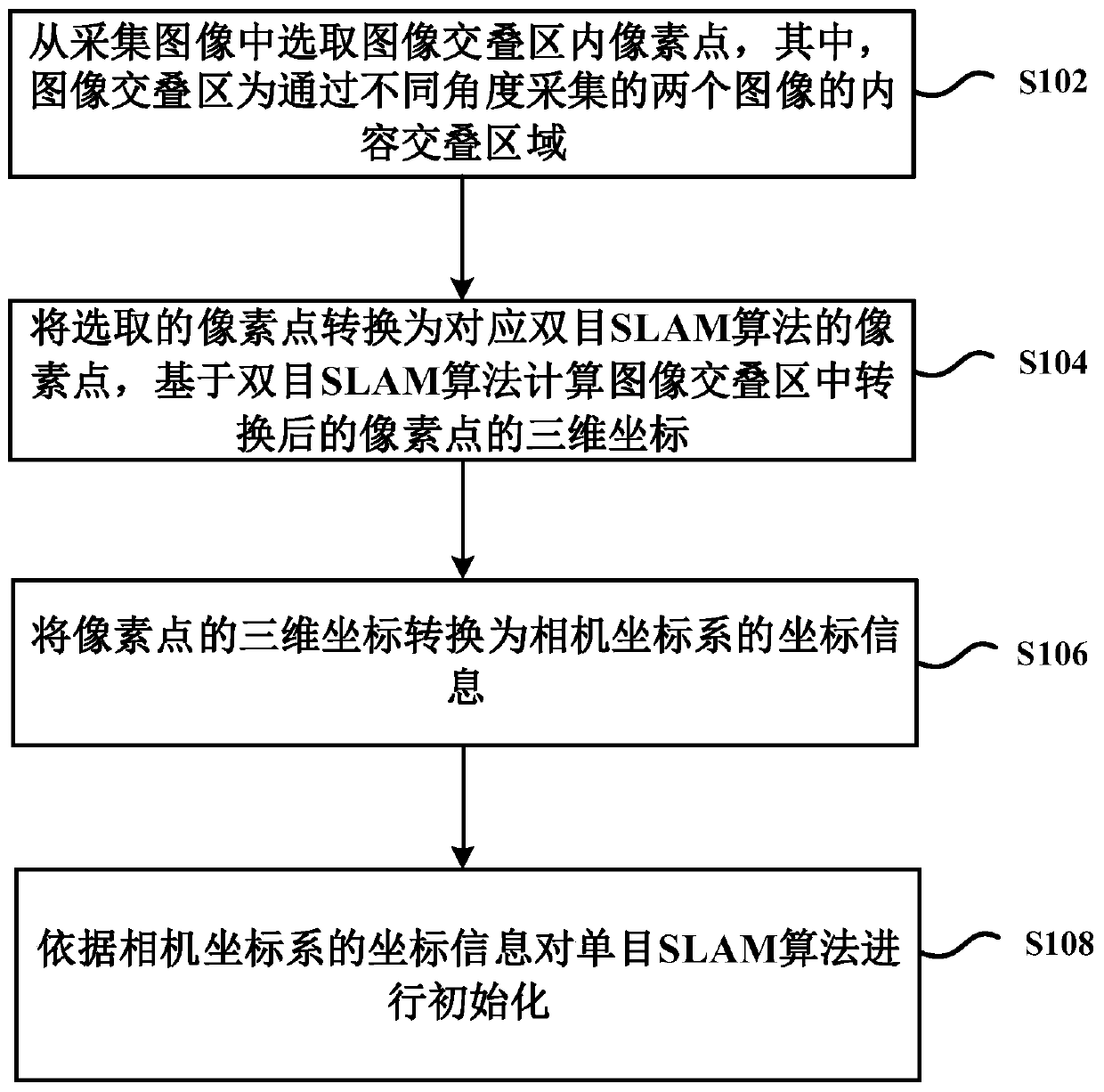
[0043] In order to solve the above technical problem, an embodiment of the present invention provides a method for initializing a monocular SLAM algorithm. figure 1 A schematic flow chart of a method for initializing a monocular SLAM algorithm according to an embodiment of the present invention is shown. see figure 1 , the method at least includes step S102 to step S108.
[0044] Step S102 , selecting pixels in an image overlappi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More