

Method and device for extracting position information of obstacles
A technology of location information and obstacles, applied in the field of automatic driving, can solve the problems of hidden dangers in driving strategies, failure to obtain real location information of obstacle vehicles and pedestrians, and ignore location information, so as to eliminate mutual influence, improve safety, and accurately extract Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] Embodiment 1 of the present application provides a method for extracting obstacle location information, which will be described in detail below with reference to the accompanying drawings.
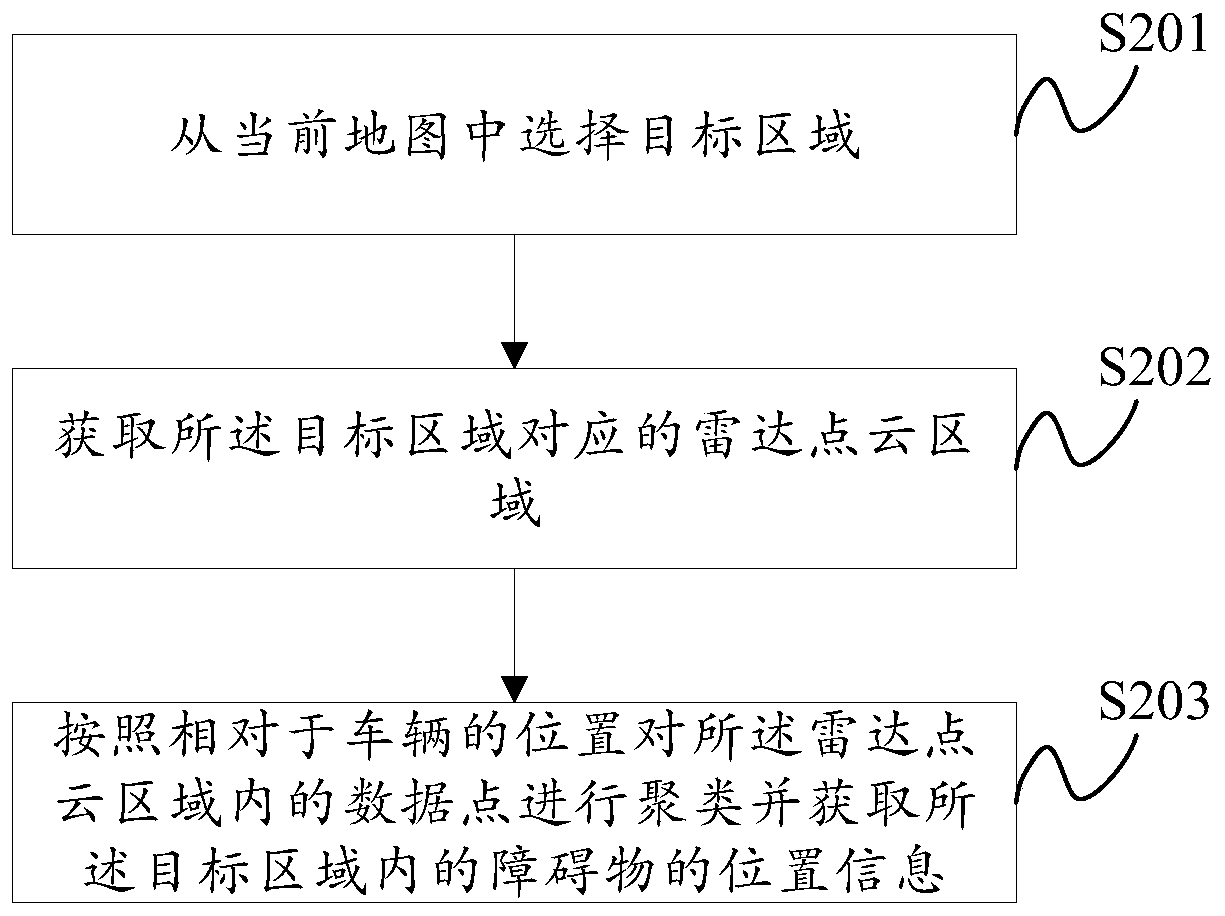
[0048] see figure 2 , which is a flowchart of a method for extracting obstacle position information provided in Embodiment 1 of the present application.
[0049] The method described in the embodiment of the present application includes the following steps:
[0050] S201: Select a target area from the current map.
[0051] The current map refers to the map of the current driving area of the vehicle. This application does not specifically limit the range of the current map. In a possible implementation, the specific location of the vehicle can be obtained by using a satellite navigation device on the vehicle information, combined with known map information to obtain the current map.
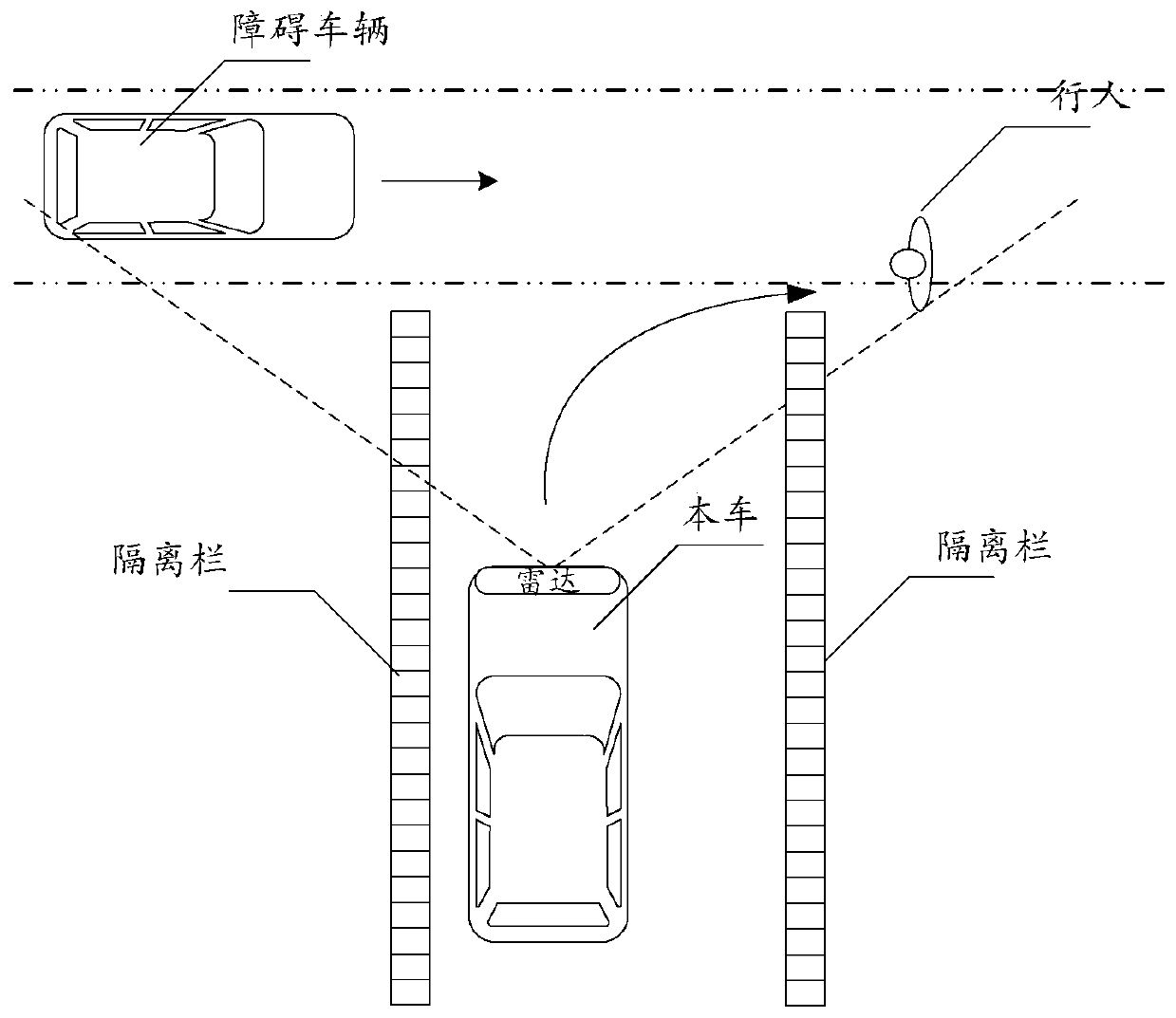
[0052] The target area is the area where the obstacle needs to be extracted, and the target ar...
Embodiment 2
[0071] Embodiment 2 of the present application also provides another method for extracting obstacle position information, which will be described in detail below with reference to the accompanying drawings.
[0072] see Figure 5 , which is a flow chart of another method for extracting obstacle position information provided in Embodiment 2 of the present application.
[0073] The method described in the embodiment of the present application includes the following steps:
[0074] S201: Select a target area from the current map.
[0075] S202a: Determine a radar point cloud area corresponding to the target area according to the position of the radar in the current map.
[0076] Further, when the vehicle is provided with a camera and the target area is within the shooting range of the camera, this step specifically further includes:
[0077] Converting the coordinate system of the radar into the coordinate system of the camera according to the relative position of the camera a...
Embodiment 3
[0092] Based on the method for extracting location information of obstacles provided in the foregoing embodiments, Embodiment 3 of the present application further provides a device for extracting location information of obstacles, which will be described in detail below with reference to the accompanying drawings.
[0093] see Figure 7 , which is a structural diagram of an apparatus for extracting obstacle position information provided in Embodiment 3 of the present application.
[0094] The device described in this embodiment of the present application includes: a selection unit 701 , a first acquisition unit 702 and a second acquisition unit 703 .
[0095] The selection unit 701 is configured to select a target area from the current map;
[0096] The first acquiring unit 702 is configured to acquire a radar point cloud area corresponding to the target area;
[0097] The second acquiring unit 703 is configured to cluster the data points in the radar point cloud area accordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More