

Unmanned vehicle track real-time planning method based on road structure weight fusion
A road structure, unmanned vehicle technology, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve problems such as poor real-time performance, difficult application, and difficult to achieve optimal driving decision-making, to enhance efficiency, ensure correctness, Achieve the effect of continuity and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
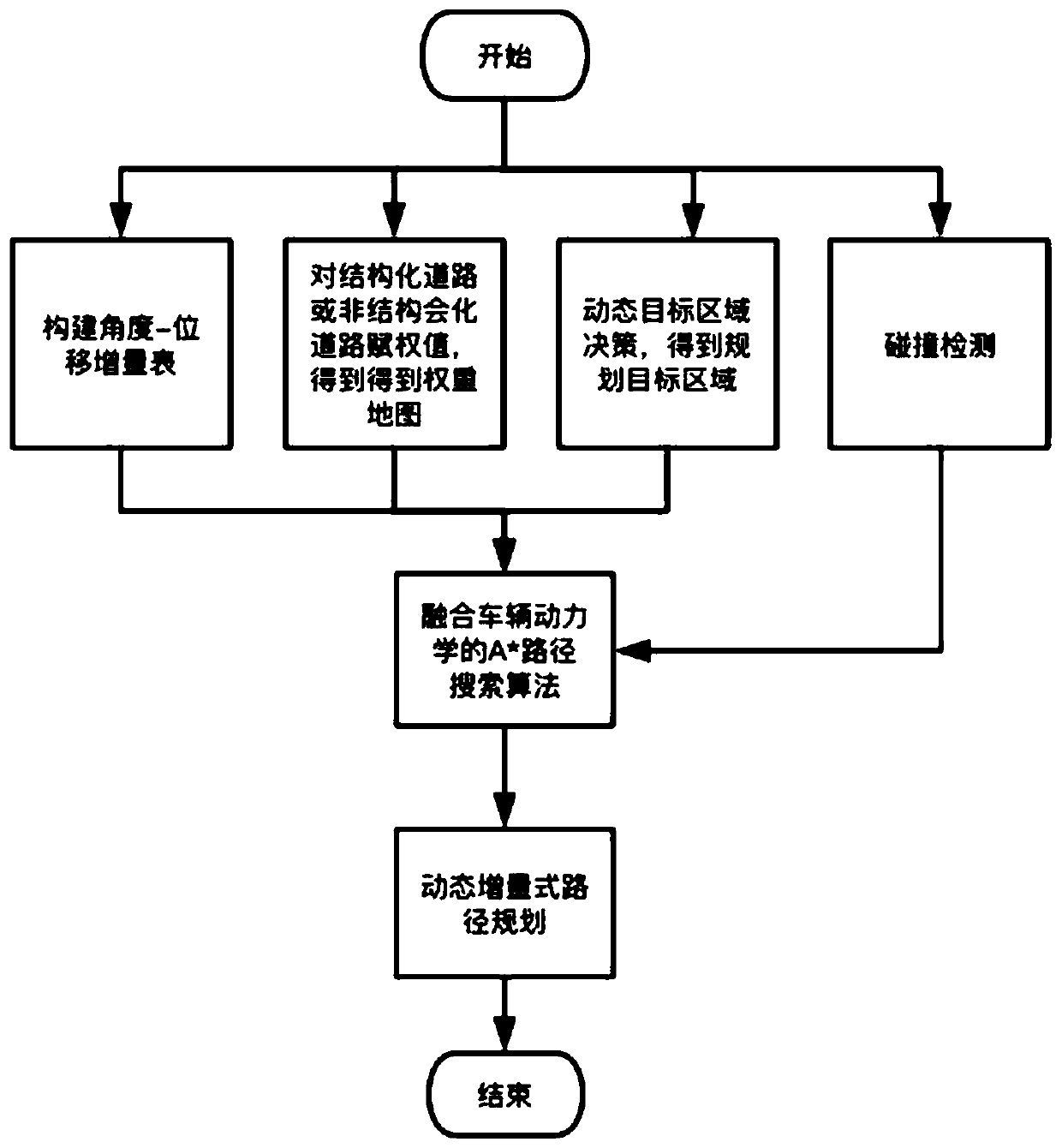
[0041] The technical solution of the present application will be further introduced below in combination with specific embodiments and accompanying drawings.
[0042] Step 1 builds an angle-displacement incremental table to simplify the calculation of the motion equation in step 1.
[0043] Step 1.1, the motion of the vehicle in continuous time and space, the equation of motion of the vehicle can be expressed as:
[0044] dx(t)=v*dt*cos(θ t )
[0045] dy(t)=v*dt*sin(θ t )
[0046] θ t ∈[-k,k]
[0047] Currently traveling at the speed of v, the current heading angle is θ t , the allowable change of heading angle in the current situation is from -k to k.
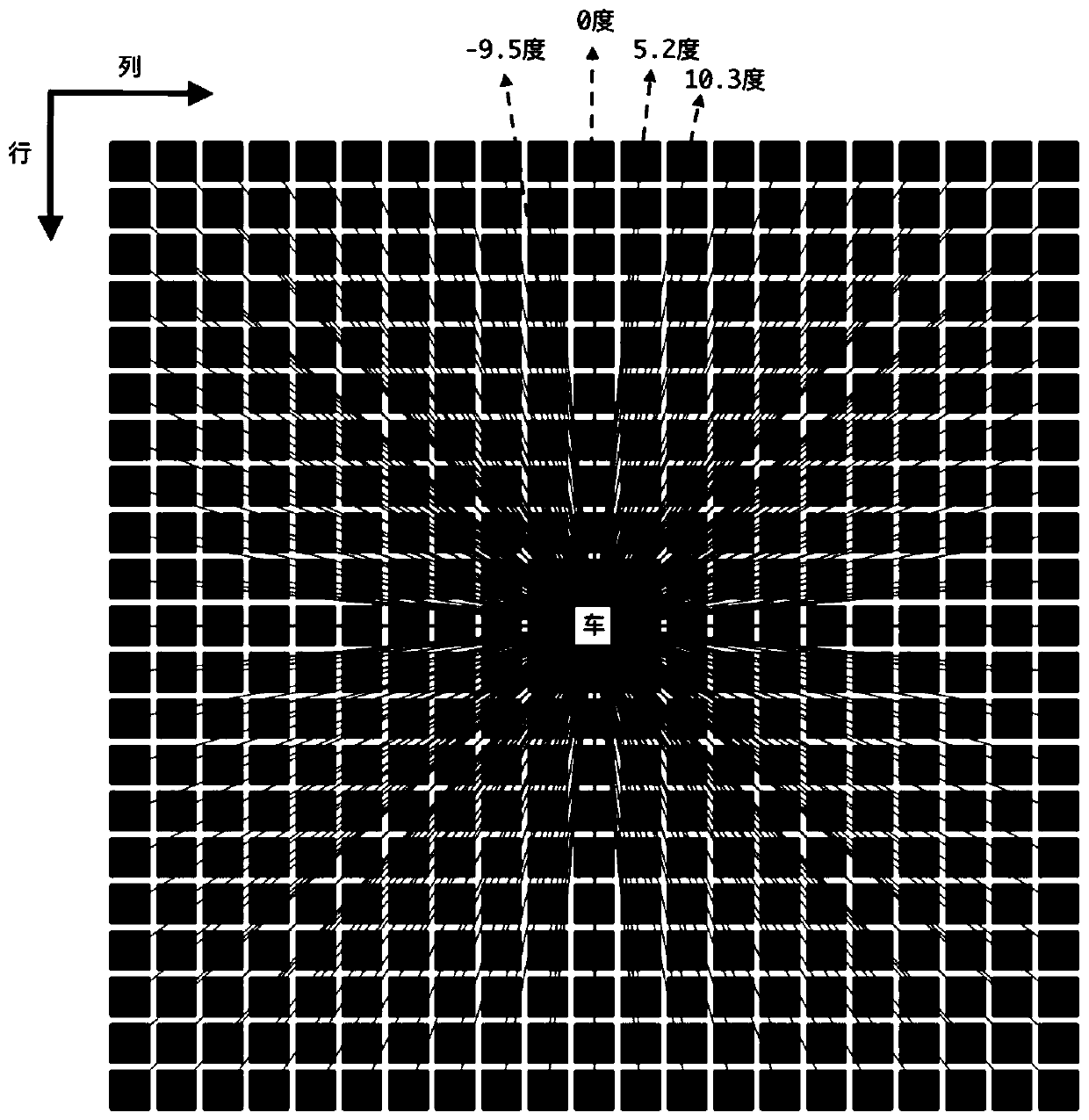
[0048] Step 1.2 takes the car as the center, and discretizes the movement process of the car's angle-displacement increment with an array table composed of rows and columns.
[0049] The table is named "angle-displacement increment table", with the car as the center, the Euclidean distance between each grid and the cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More