

A path planning method for robots in complex and narrow environments
A path planning and robotics technology, which is applied to instruments, vehicle position/route/altitude control, control/regulation systems, etc., and can solve problems such as the weak ability of genetic algorithms to adapt to a wide range of environments, multi-experience parameters, and precocious algorithms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments: taking this as an example to further describe and illustrate the present application.
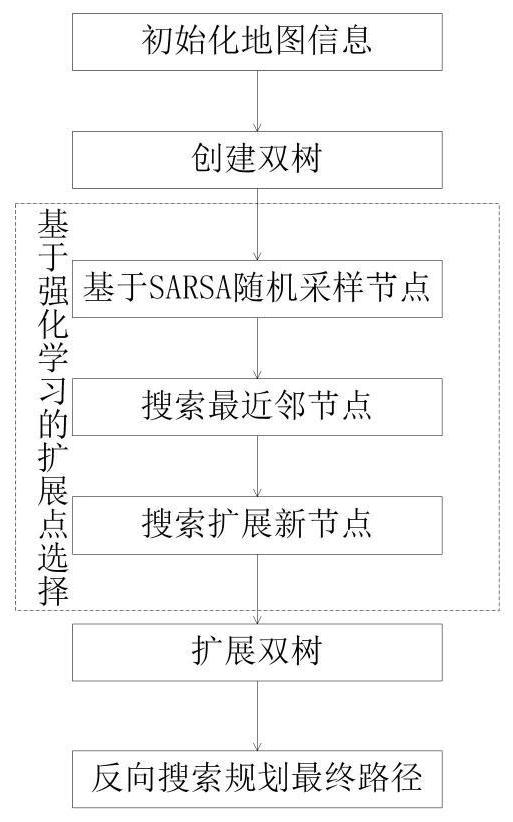
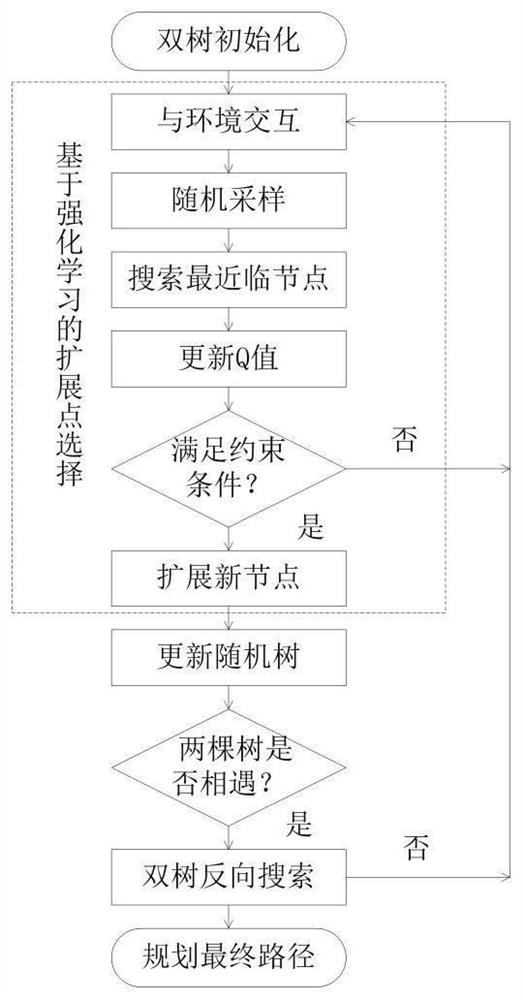
[0046] This application uses the RRT-RL-C algorithm and uses the SARSA(λ) method to select nodes with high rewards when expanding nodes. The new node is always in a position close to the target point and has a good performance evaluation, so that the random search tree in each cycle The role is maximized, and the number of branch leaf nodes of the extended tree is small, the number of iterations is small, and the planning path is short, and the optimal or near-optimal solution can be found faster in a complex configuration space. The RRT-Connect tree is randomly expanded in space, so there is randomness in the relative position of the parent node and the child node. However, considering the stability of the robot during the forward process, the RL-RRT...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More