

Determination method of optimal lane and vehicle control system
A determination method and lane technology, applied to the determination method of the optimal lane and the field of vehicle control system, can solve the problem that the driver cannot determine the optimal lane in advance and cannot be arranged in the lane
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
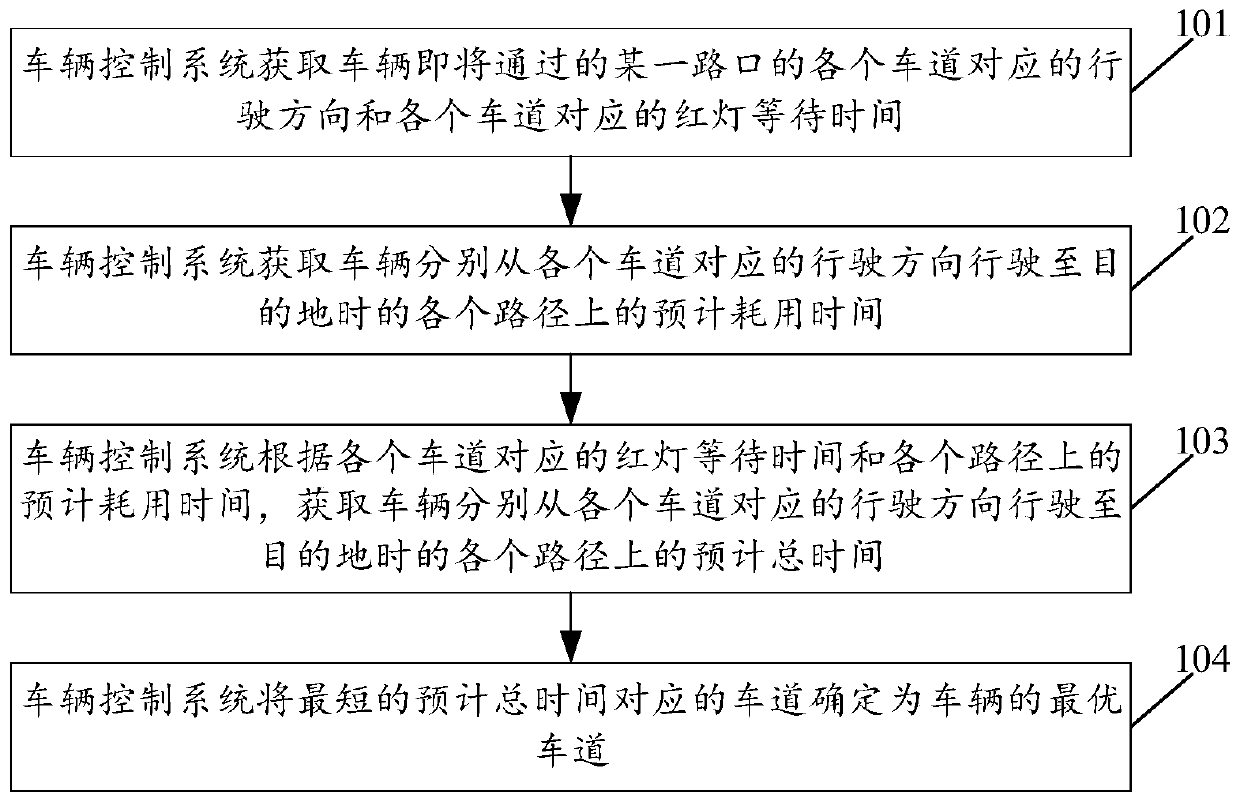
[0100] see figure 1 , figure 1 It is a schematic flowchart of a method for determining an optimal lane disclosed in an embodiment of the present invention. like figure 1 As shown, the method may include the following steps.
[0101] 101. The vehicle control system acquires the driving direction corresponding to each lane of a certain intersection that the vehicle is about to pass through and the waiting time for a red light corresponding to each lane.
[0102] In the embodiment of the present invention, the driving direction can be obtained through the camera module and / or the intersection traffic sign provided by the V2I facility, and the red light waiting time can be obtained through the cloud map and / or the traffic light information provided by the V2I facility, which is not limited in the embodiment of the present invention . Among them, the V2I facility can be a facility set up in each lane and capable of communicating with vehicles on each lane, such as traffic light...
Embodiment 2
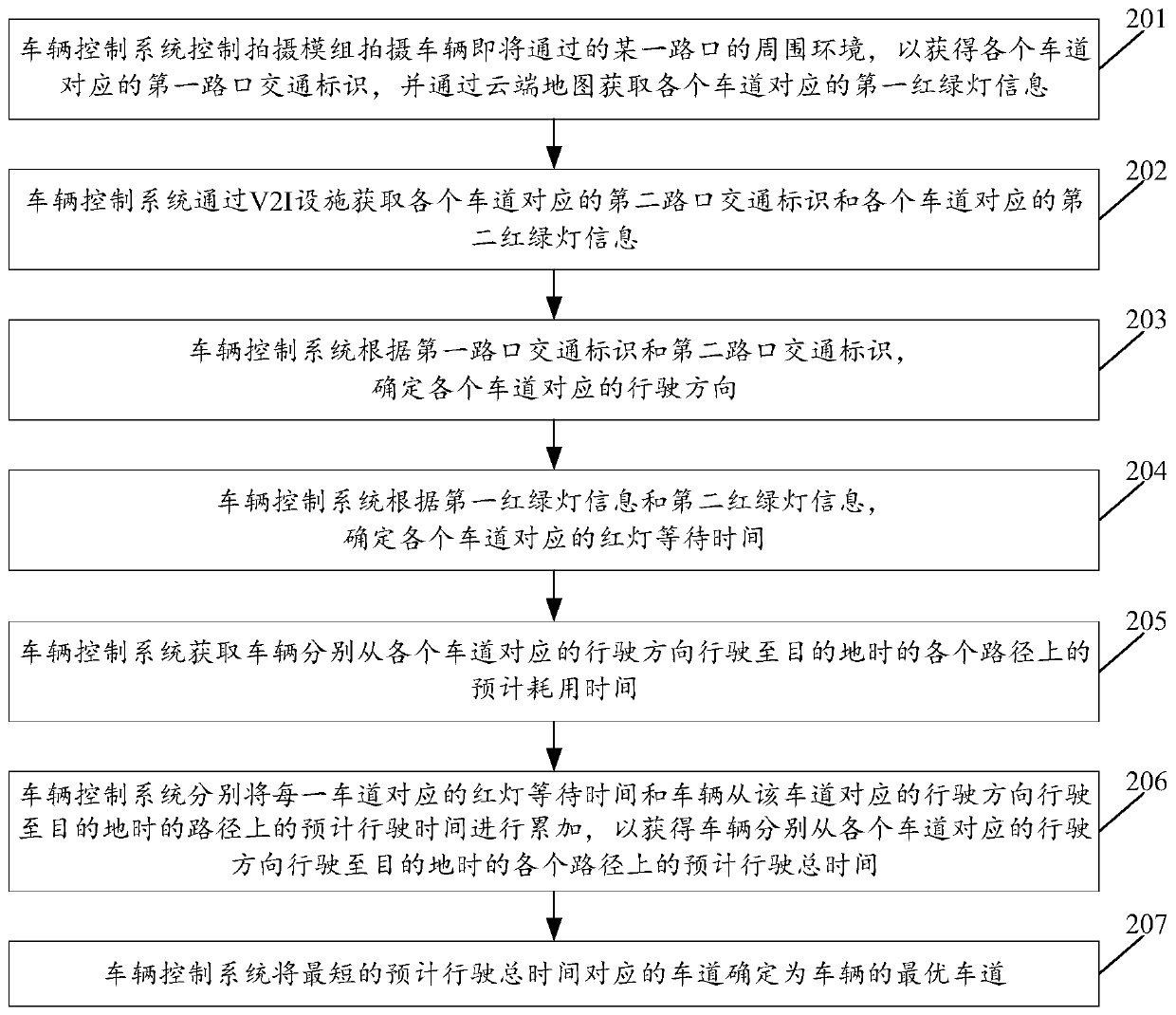
[0132] see figure 2 , figure 2 is a schematic flowchart of another optimal lane determination method disclosed in the embodiment of the present invention. like figure 2 As shown, the method may include the following steps.
[0133] 201. The vehicle control system controls the photographing module to photograph the surrounding environment of a certain intersection that the vehicle is about to pass, so as to obtain the first intersection traffic sign corresponding to each lane, and obtain the first traffic light information corresponding to each lane through the cloud map.
[0134] In the embodiment of the present invention, the surrounding environment may be the road surface of each lane, or may be a signboard corresponding to each lane, which is not limited in this embodiment of the present invention.
[0135] In the embodiment of the present invention, the first intersection traffic sign corresponding to each lane at least includes any one of straight ahead, left turn, ri...
Embodiment 3
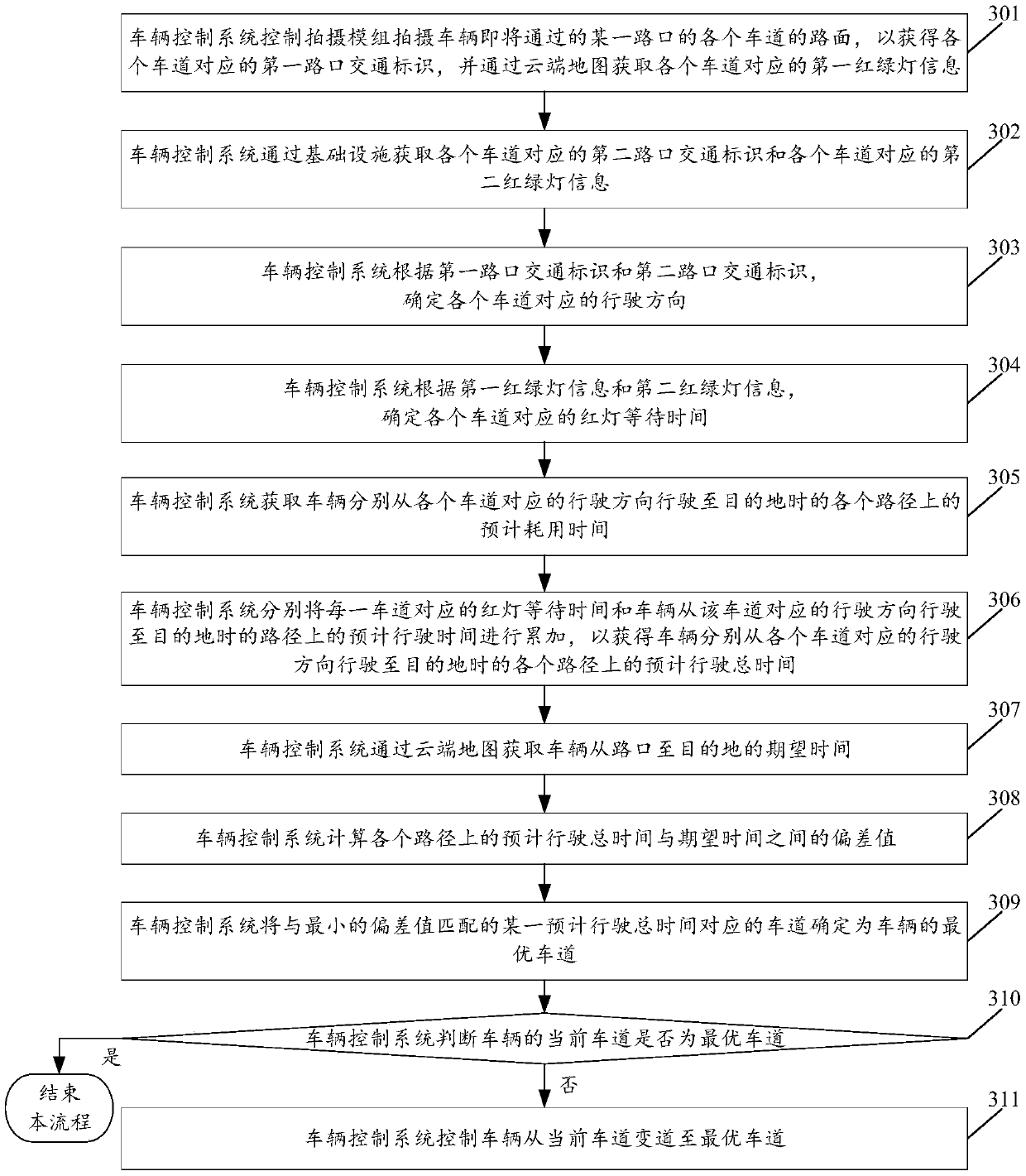
[0169] see image 3 , image 3 It is a schematic flowchart of another method for determining an optimal lane disclosed in an embodiment of the present invention. like image 3 As shown, the method may include the following steps.
[0170] 301-306; where, Step 301-Step 306 is the same as Step 201-Step 206 in Embodiment 2, and will not be repeated here.
[0171] 307. The vehicle control system obtains the expected time of the vehicle from the intersection to the destination through the cloud map.
[0172] In the embodiment of the present invention, the expected time is the time required for the vehicle to travel from the intersection to the destination obtained from the cloud map.
[0173] 308. The vehicle control system calculates the deviation value between the estimated total time and the expected time on each route.
[0174] 309. The vehicle control system determines the lane corresponding to a certain estimated total time that matches the smallest deviation value as th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More